Hi,
I'm using Velodyne Puck (VLP16) and a Realsense D455 camera to try to generate a 3D pointcloud map, either with the pointcloud coming exclusively from lidar (while the depth camera is used only for loop closure), or from fused lidar and camera pointclouds.
So far I haven't managed to get RTAB-Map to generate a 3D map from both of these sensors together, only one or the other. I've experimented with the demo_husky.launch file (without the Husky bot itself) and a custom launch file, with both visual and ICP odometry, but I can't seem to get scan_cloud_assembling to work (I'm assuming that I should be looking into that process, I could be wrong). Another thing I tried doing was setting the Grid/FromDepth parameter to false, as recommended in a different thread.
On another note, what would be a good launch file to try out if I want to generate a 3D map from the VLP16 on its own?
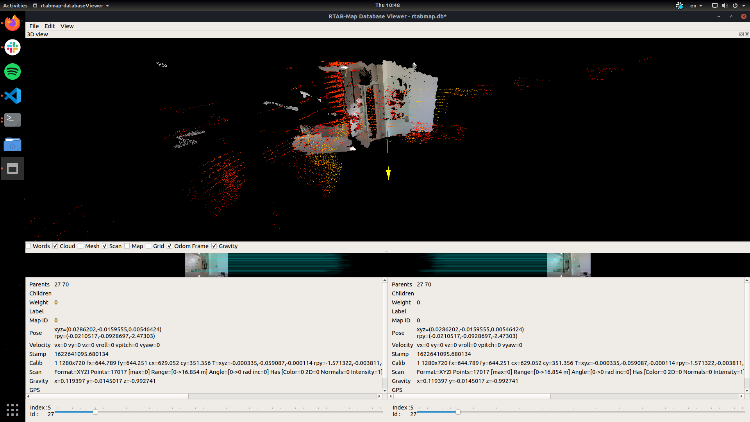
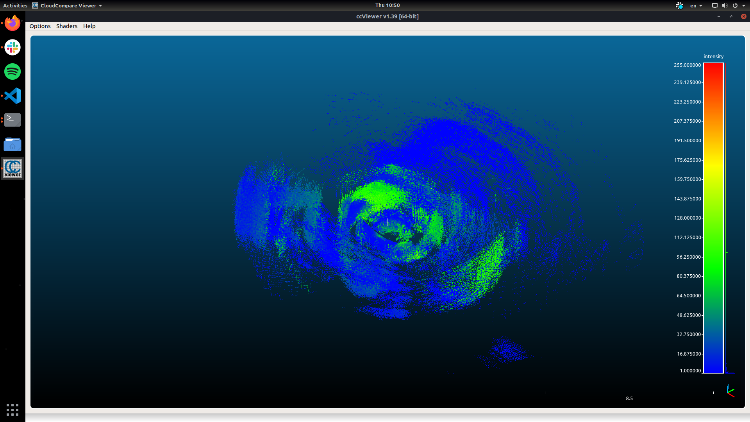
Edit: I've added an image from the database viewer, it seems like cloud assembly works to an extent, but the Velodyne part looks really messy when viewed from CloudCompare.
Launch file that I'm currently using: Pastebin