Hi,
I am still working on more complex examples involving external IMUs/cameras at the same time, but for a basic example using the LiDAR alone, here what you need to do.
1) In Preferences, reset all settings to defaults, then click on "LiDAR 3D ICP" button to load a preset.

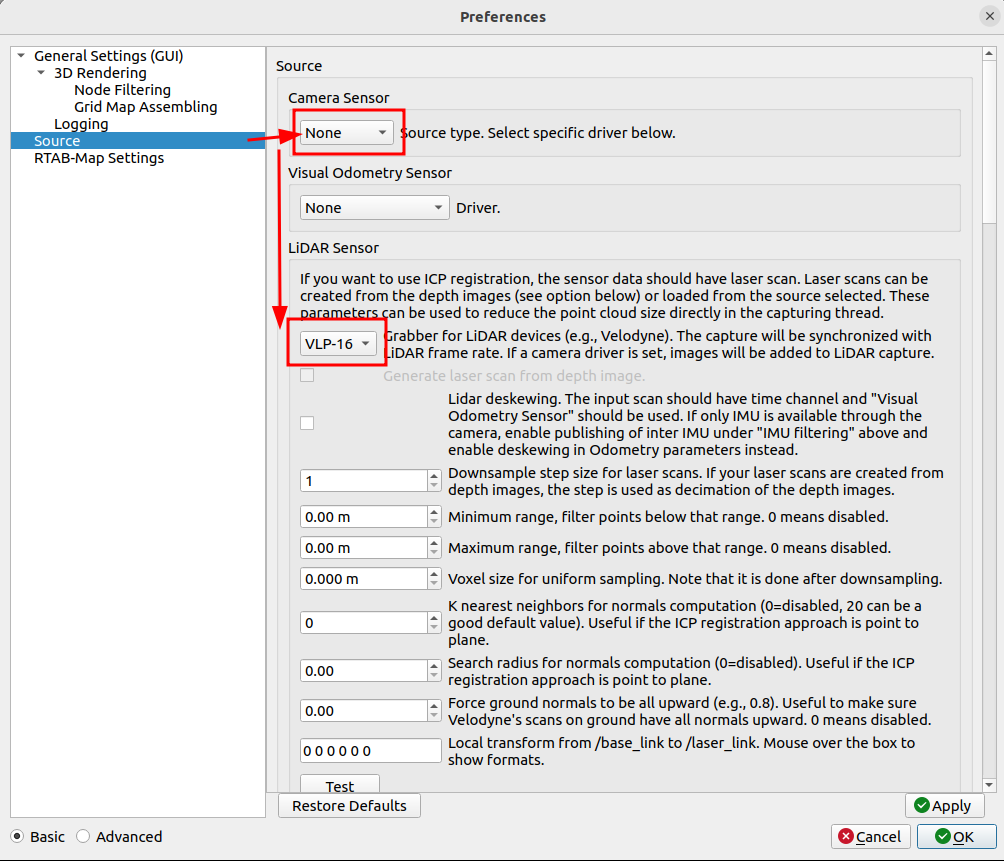
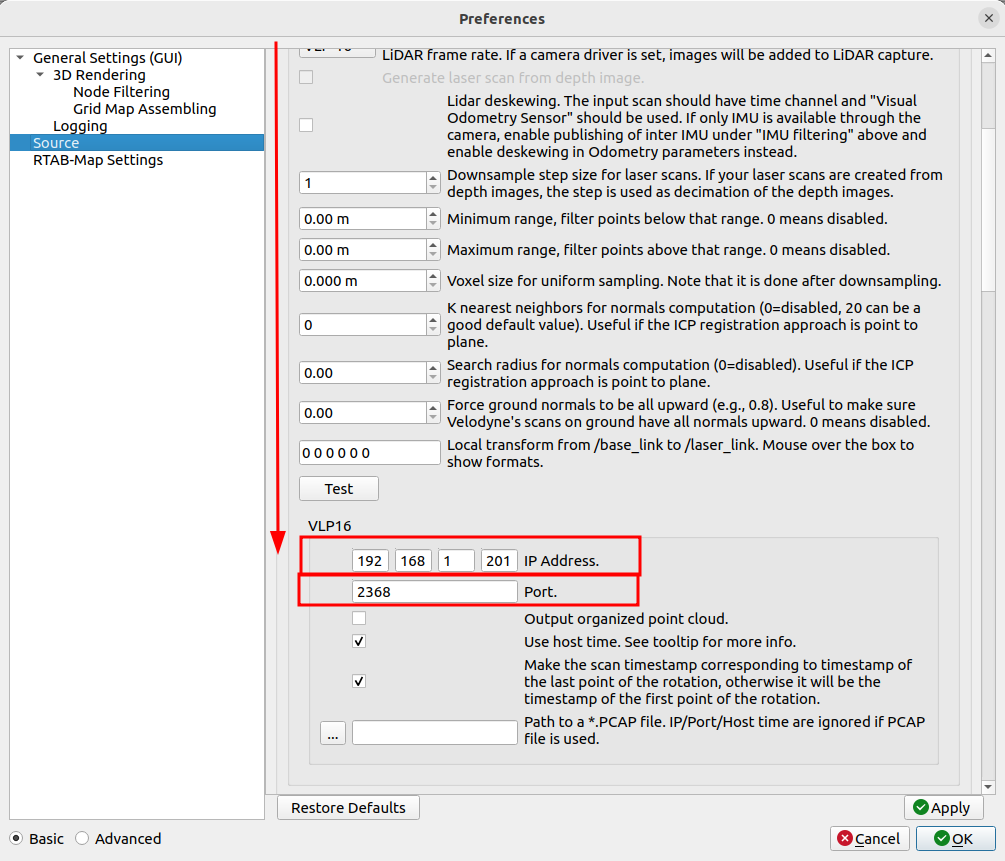
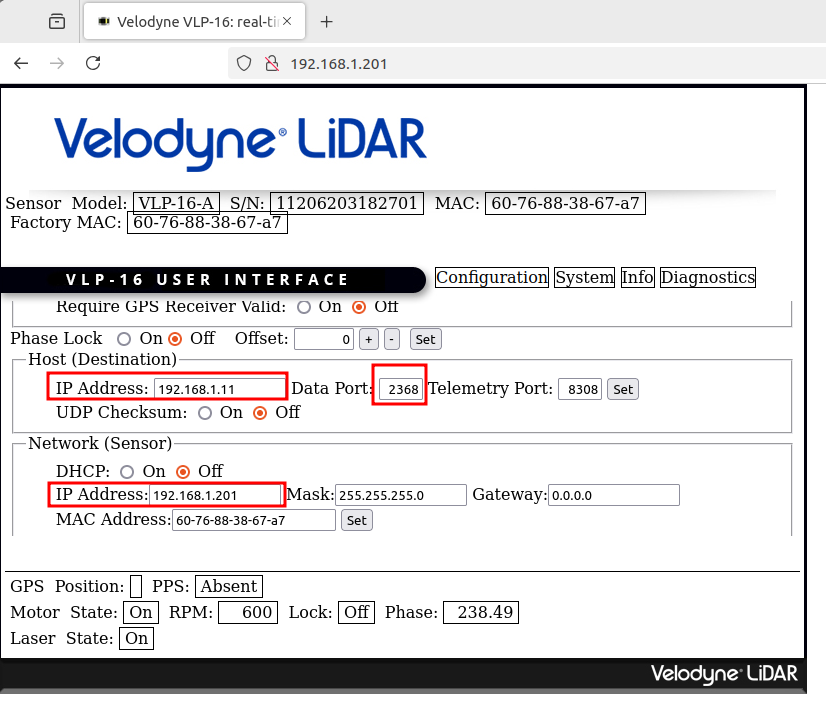
2) Under Source panel, set camera driver to None, then set LiDAR driver to VLP16, then scroll down to adjust the IP of the LiDAR (you can use a web browser to look at the current LiDAR config, set host IP to your computer receiving the scans):
3) Go back to main window, click on "New Database", then click on "Start":
When using the LiDAR alone, there is no visual loop closure and if ICP odometry gets lost, it may be difficult to recover, so make sure the lidar field of view is not blocked and avoid fast motions.
cheers,
Mathieu

