Hi,
I've implemented RGBD VO from RTABMAP on my robot simulation, and I've noticed that the odometry messages start right on the odom frame (vo_frame_id parameter). For some reason yet to discover (I think due to the gazebo simulation) my base_link frame drifts a little with respect to the odom frame, so when I start the simulation, the visual odometry (red arrow) has a little offset in respect to the real wheel odometry (green arrow) coming from the simulation:
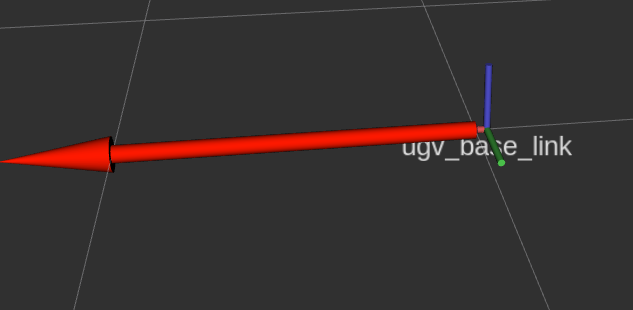
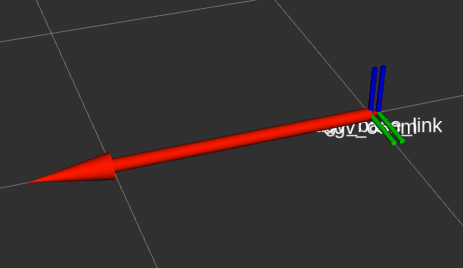
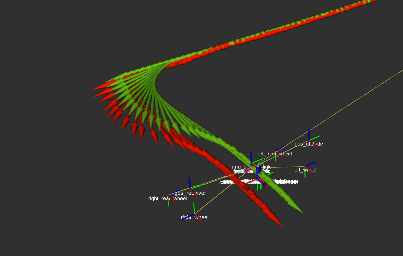
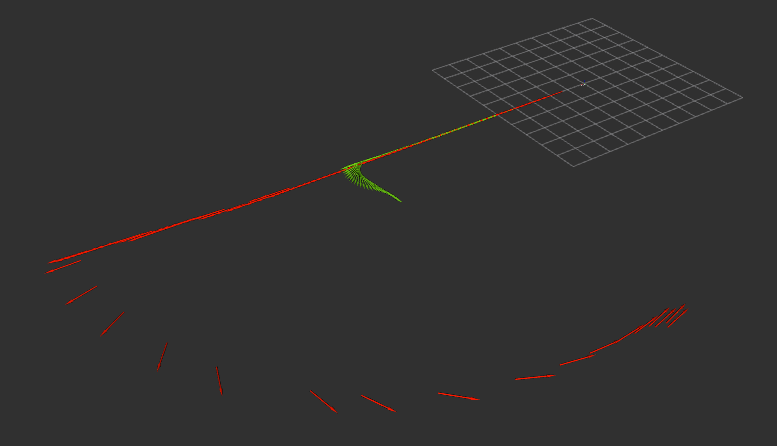
In this case, my wheel odometry starts right on the base_link frame, which makes more sense to me. I know that at the beginning odom and base link should be the same and this would eliminate this drift, but when I specify the vo_frame_id parameter to base_link, the visual odometry comes out as double what it should be.
My question is, shouldn't the odometry start off the base_link frame and have no doubling issues in case the odom and base link frames don't start out in the same place?
Thank you,
Rodrigo Gonzalez

