Hi,
I tested the new interface and subscribing to odom_info + scan/scan_cloud at the same time should work. In your example, it is like that your laser_assembler is not assembling any scans, it just sends a single scan. Try setting
laser_assembler to assemble scans for 1 second, then
publish the assembled cloud at 1 Hz. If the cloud is published at 1 Hz, you can set "
Rtabmap/DetectionRate=0" to add all clouds. Setting "
RGBD/LinearUpdate=0" and "
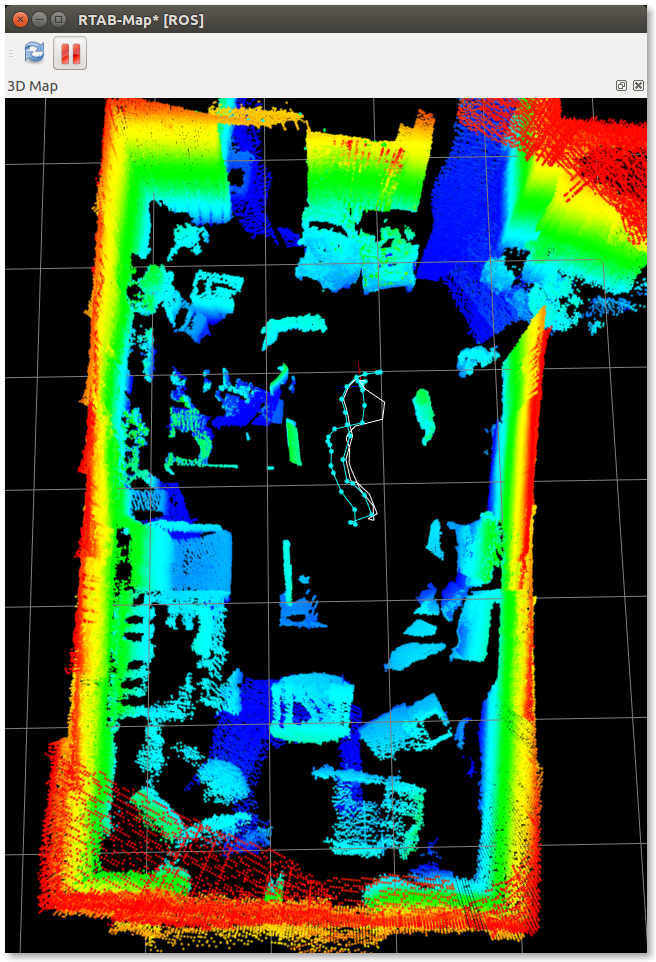
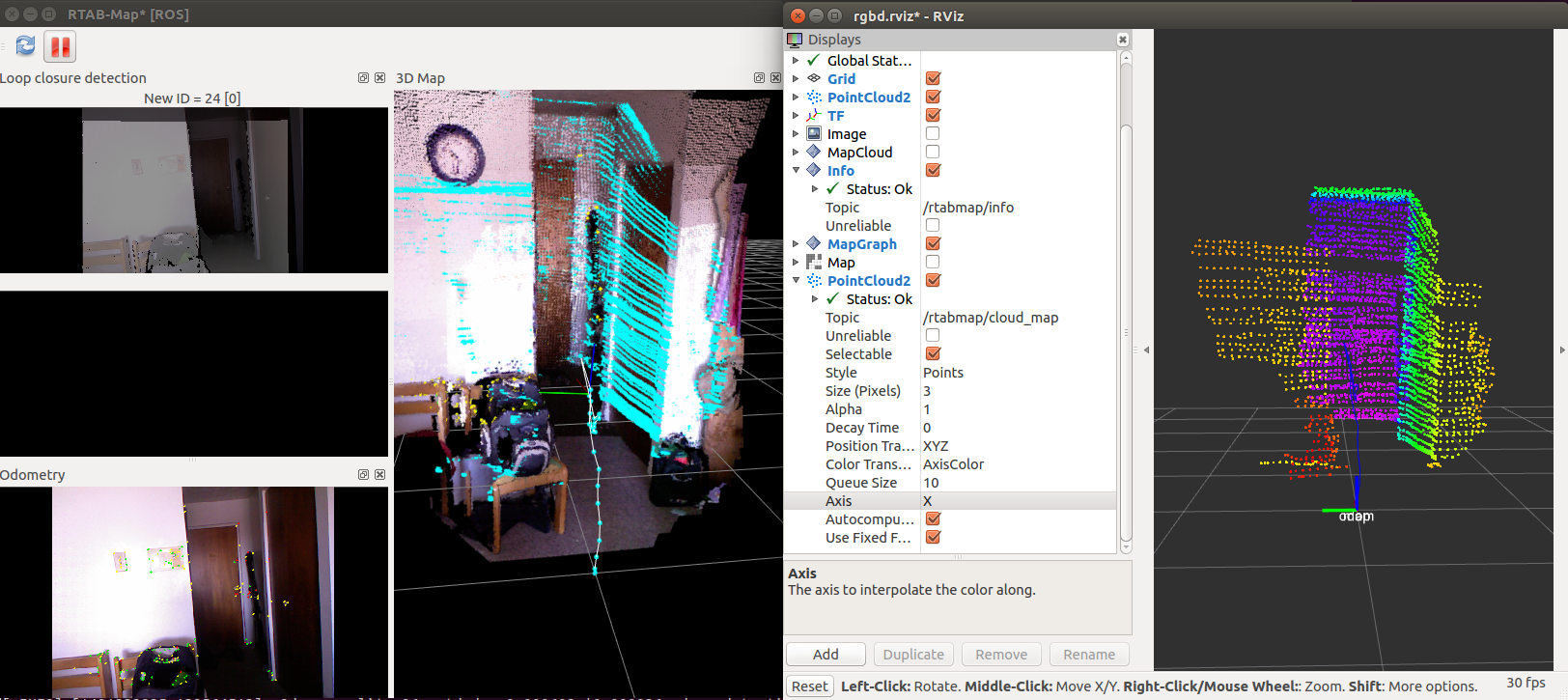
RGBD/AngularUpdate=0" is also important to avoid holes. Set "RGBD/ProximityPathMaxNeighbors=0" to avoid long proximity detection with laser scans. I verified also /rtabmap/cloud_map, and it should work:
<node pkg="rtabmap_ros" type="rtabmap" name="rtabmap">
...
<param name="Rtabmap/DetectionRate" type="string" value="0"/>
<param name="RGBD/LinearUpdate" type="string" value="0"/>
<param name="RGBD/AngularUpdate" type="string" value="0"/>
<param name="RGBD/ProximityPathMaxNeighbors" type="string" value="0"/>
</node>
For convenience, I did a small demo with
laser_assembler. The launch file is
test_laser_assembler.launch (I've set
periodic_snapshotter's rate to 1 Hz and used
AssembleScans2 service ("assemble_scans2") with publishing
PointCloud2 msg (assembled_cloud2)):
<!-- Build laser_assembler package from source to have periodic_snapshotter node -->
<!-- Also use assemble_scans2 service in periodic_snapshotter, publish PointCloud2 and set duration to 1 second -->
$ roslaunch rtabmap_ros test_laser_assembler.launch
cheers,
Mathieu


 :
: