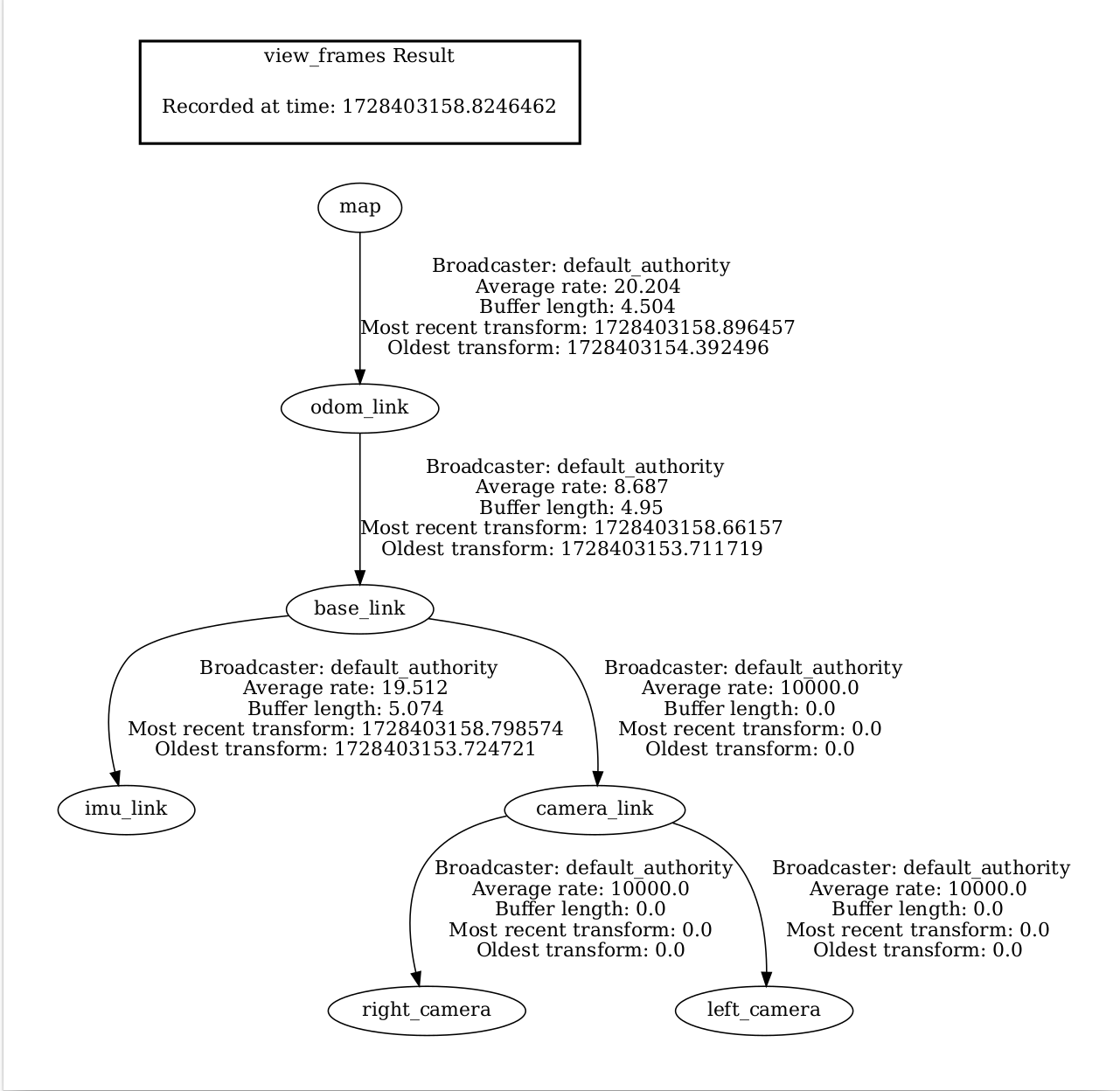
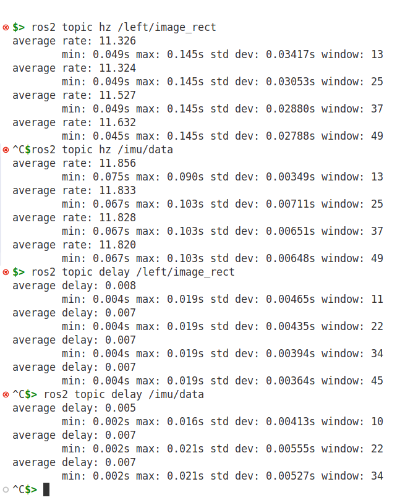
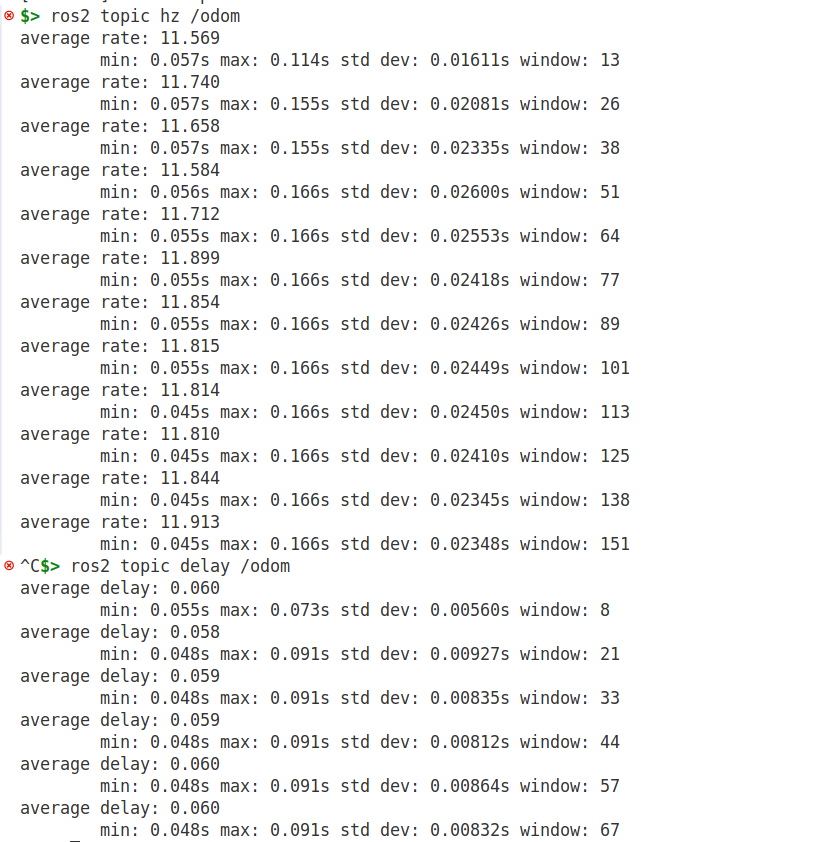
We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.

We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.

|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
Administrator
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
Administrator
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
Administrator
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
Administrator
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
Administrator
|


Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
Administrator
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
|
Re: We are receiving imu data (buffer=37), but cannot interpolate imu transform at time. IMU won't be added to graph.
|
Administrator
|
| Free forum by Nabble | Edit this page |