Welcome to all users using RTAB-Map (Real-Time Appearance-Based Mapping), use this forum to ask your question so we can share troubleshooting with everyone.
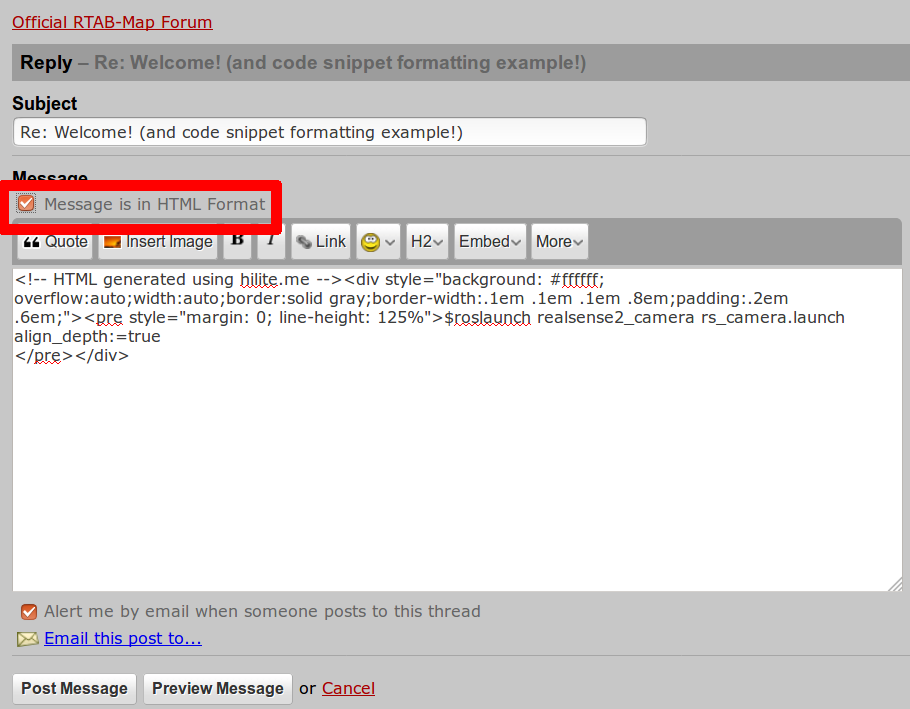
If you want to post code snippet, go to page http://hilite.me/ and copy/paste the resulting html here while checking the "Message is in HTML Format" checkbox.
Example using raw tag in this forum:
$ roslaunch freenect_launch freenect.launch depth_registration:=true
$ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start"
After formatting with the link above (bash format):
$ roslaunch freenect_launch freenect.launch depth_registration:=true
$ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start"