Thanks matlabbe for your reply. Finally I have fixed my issue.
When my robot is turning back 180 degree, the rtabmp log shows that ICP registration begins to run, but the match ratio needs to be as good as 0.8 or more. My robot usually can only produce laser match with correspondence ratio at 0.5 or 0.6.
[ INFO] [1609378276.699829539]: rtabmap (126): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0770s, Maps update=0.0011s pub=0.0000s (local map=116, WM=116)
[ INFO] (2020-12-31 01:31:17.706) Rtabmap.cpp:1059::process() getting data...
[ INFO] (2020-12-31 01:31:17.706) Rtabmap.cpp:1205::process() Updating memory...
[ INFO] (2020-12-31 01:31:17.706) Memory.cpp:4311::createSignature() Extract features
[ INFO] (2020-12-31 01:31:17.764) Rtabmap.cpp:1228::process() Processing signature 127 w=0 map=0
[ INFO] (2020-12-31 01:31:17.764) Rtabmap.cpp:1230::process() timeMemoryUpdate=0.058916s
[ INFO] (2020-12-31 01:31:17.765) Rtabmap.cpp:1323::process() Odometry refining: guess = xyz=0.450933,-0.000002,0.000000 rpy=0.000000,-0.000000,0.000000
[ INFO] (2020-12-31 01:31:17.771) Rtabmap.cpp:1334::process() Odometry refining: update neighbor link (126->127, variance:lin=0.000017, ang=0.000002) from xyz=0.450933,-0.000002,0.000000 rpy=0.000000,-0.000000,0.000000 to xyz=0.461527,-0.006576,0.000000 rpy=0.000000,0.000000,-0.000842
[ INFO] (2020-12-31 01:31:17.771) Rtabmap.cpp:1375::process() timeOdometryRefining=0.006739s
[ INFO] (2020-12-31 01:31:17.771) Rtabmap.cpp:1593::process() timeProximityByTimeDetection=0.000028s
[ INFO] (2020-12-31 01:31:17.771) Rtabmap.cpp:1612::process() computing likelihood...
[ INFO] (2020-12-31 01:31:17.772) Rtabmap.cpp:1730::process() timeLikelihoodCalculation=0.000238s
[ INFO] (2020-12-31 01:31:17.772) Rtabmap.cpp:1736::process() getting posterior...
[ INFO] (2020-12-31 01:31:17.772) Rtabmap.cpp:1741::process() timePosteriorCalculation=0.000197s
[ INFO] (2020-12-31 01:31:17.772) Rtabmap.cpp:1752::process() creating hypotheses...
[ INFO] (2020-12-31 01:31:17.772) Rtabmap.cpp:1766::process() Highest hypothesis=29, value=0.077528, timeHypothesesCreation=0.000036s
[ INFO] (2020-12-31 01:31:17.772) Rtabmap.cpp:1841::process() Time emptying memory trash = 0.004702s, joining (actual overhead) = 0.000012s
[ INFO] (2020-12-31 01:31:17.772) Rtabmap.cpp:2219::process() timeReactivations=0.000007s
[ INFO] (2020-12-31 01:31:17.772) Rtabmap.cpp:2430::process() timeProximityBySpaceVisualDetection=0.000190s
[ INFO] (2020-12-31 01:31:17.772) Rtabmap.cpp:4261::optimizeGraph() get constraints (ids=10, 10 poses, 9 edges) time 0.000027 s
[ INFO] (2020-12-31 01:31:17.772) OptimizerGTSAM.cpp:592::optimize() Stop optimizing, error is already under epsilon (0.000000 < 0.000010)
[ INFO] (2020-12-31 01:31:17.772) Rtabmap.cpp:4319::optimizeGraph() Optimization time 0.000394 s
[ INFO] (2020-12-31 01:31:17.772) Graph.cpp:1319::radiusPosesFiltering() Cloud filtered In = 10, Out = 2
[ INFO] (2020-12-31 01:31:17.781) RegistrationIcp.cpp:1437::computeTransformationImpl() Cannot compute transform (cor=499 corrRatio=0.692094/0.800000 maxLaserScans=721)
[ INFO] (2020-12-31 01:31:17.781) Rtabmap.cpp:2570::process() Local scan matching rejected: Cannot compute transform (cor=499 corrRatio=0.692094/0.800000 maxLaserScans=721)
[ INFO] (2020-12-31 01:31:17.781) Rtabmap.cpp:2585::process() timeProximityBySpaceDetection=0.008648s
[ INFO] (2020-12-31 01:31:17.781) Rtabmap.cpp:2644::process() timeAddLoopClosureLink=0.000008s
[ INFO] (2020-12-31 01:31:17.781) Rtabmap.cpp:3135::process() timeMapOptimization=0.000007s
[ INFO] (2020-12-31 01:31:17.781) Rtabmap.cpp:3162::process() sending stats...
[ INFO] (2020-12-31 01:31:17.781) Rtabmap.cpp:3174::process() send all stats...
[ INFO] (2020-12-31 01:31:17.781) Rtabmap.cpp:3295::process() Localization pose = xyz=-6.331108,16.455988,0.000000 rpy=0.000000,-0.000000,0.014188
[ INFO] (2020-12-31 01:31:17.781) Rtabmap.cpp:3299::process() Set map correction = xyz=-1.552748,-0.795969,0.000000 rpy=0.000000,0.000000,-0.115400
[ INFO] (2020-12-31 01:31:17.781) Rtabmap.cpp:3372::process() Time creating stats = 0.000147...
[ INFO] (2020-12-31 01:31:17.781) Rtabmap.cpp:3452::process() timeMemoryCleanup = 0.000112s... 0 signatures removed
[ INFO] (2020-12-31 01:31:17.781) Rtabmap.cpp:3465::process() Total time processing = 0.075298s...
[ INFO] (2020-12-31 01:31:17.781) Rtabmap.cpp:3595::process() Time limit reached processing = 0.000020...
[ INFO] (2020-12-31 01:31:17.781) Rtabmap.cpp:3639::process() Adding data 127 [0] (rgb/left=1 depth/right=1)
[ INFO] [1609378277.782946752]: rtabmap (127): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0761s, Maps update=0.0009s pub=0.0000s (local map=117, WM=117)
The "Icp/CorrespondenceRatio" is set to 0.4 in the
demo_robot_mapping.launch script, and this threshold is doubled during rtabmap
initialisation.
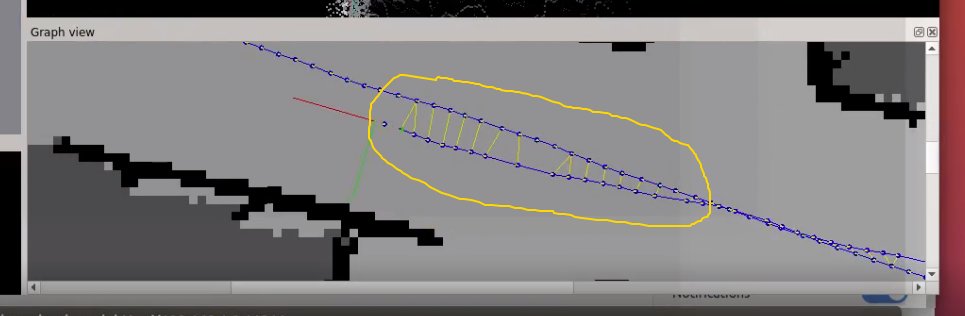
So I change the "Icp/CorrespondenceRatio" from 0.4 to 0.2 in the
demo_robot_mapping.launch script, and my issue is fixed. Now I can generate many yellow edges between forward-looking and backward-looking keyframes in the pose-graph.
Here is the resulting map database file for your reference,
https://drive.google.com/file/d/1mVKfgM4W7is5yfxuPhTWvr3YMVdU_kOS/view?usp=sharingThank you very much!
Wilson