With the default settings - in the beginning everything is fine, but somewhere on the third way visual odometry starts to drastically drift, especially along the axis y.
As far as I understand reason is a low-texture environment.
Is it possible to get good odometry results in it?
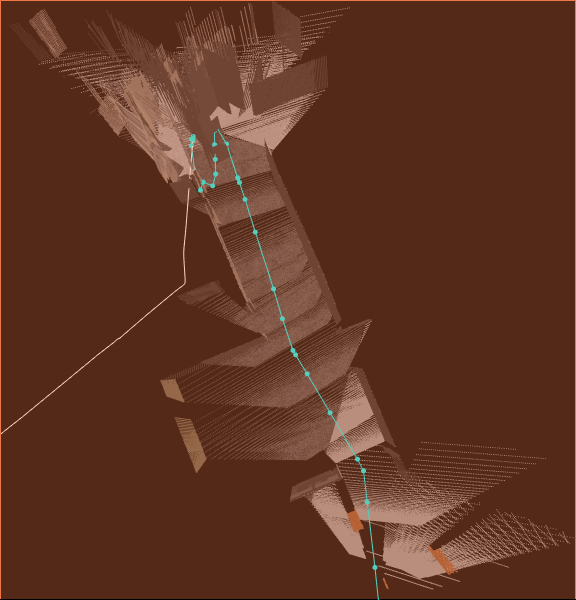
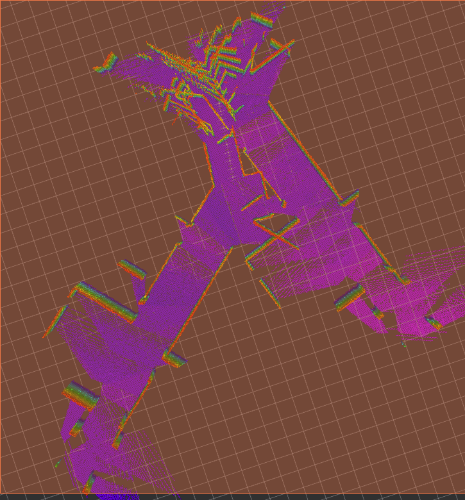
And which loop closure settings are better suited? With the current, the whole map "collapses" after a while. As I understand this is because the loop closure algorithm confuses some parts of the map with others
Example of "strange behavior" of map:
Sorry for my English. Hope for your help!

