Hi Mathieu,
Rtabmap is really amazing with the various features implemented in the integrated vslam system. Thank you very much. I am currently trying to run rtabmap_ros on a robot with a ZED2i and two RPlidar using April tab.
I have a problem here.
When the April_tag is detected, the edited map reverts to the map before editing. I think that the force re-optimized is working that described
here, but when I check the log, there are no warnings displayed. Is there something wrong with the parameter settings?
I always regenelate map from databaseViewer, then export map, edit map by gimp, and import map from databaseViewer.
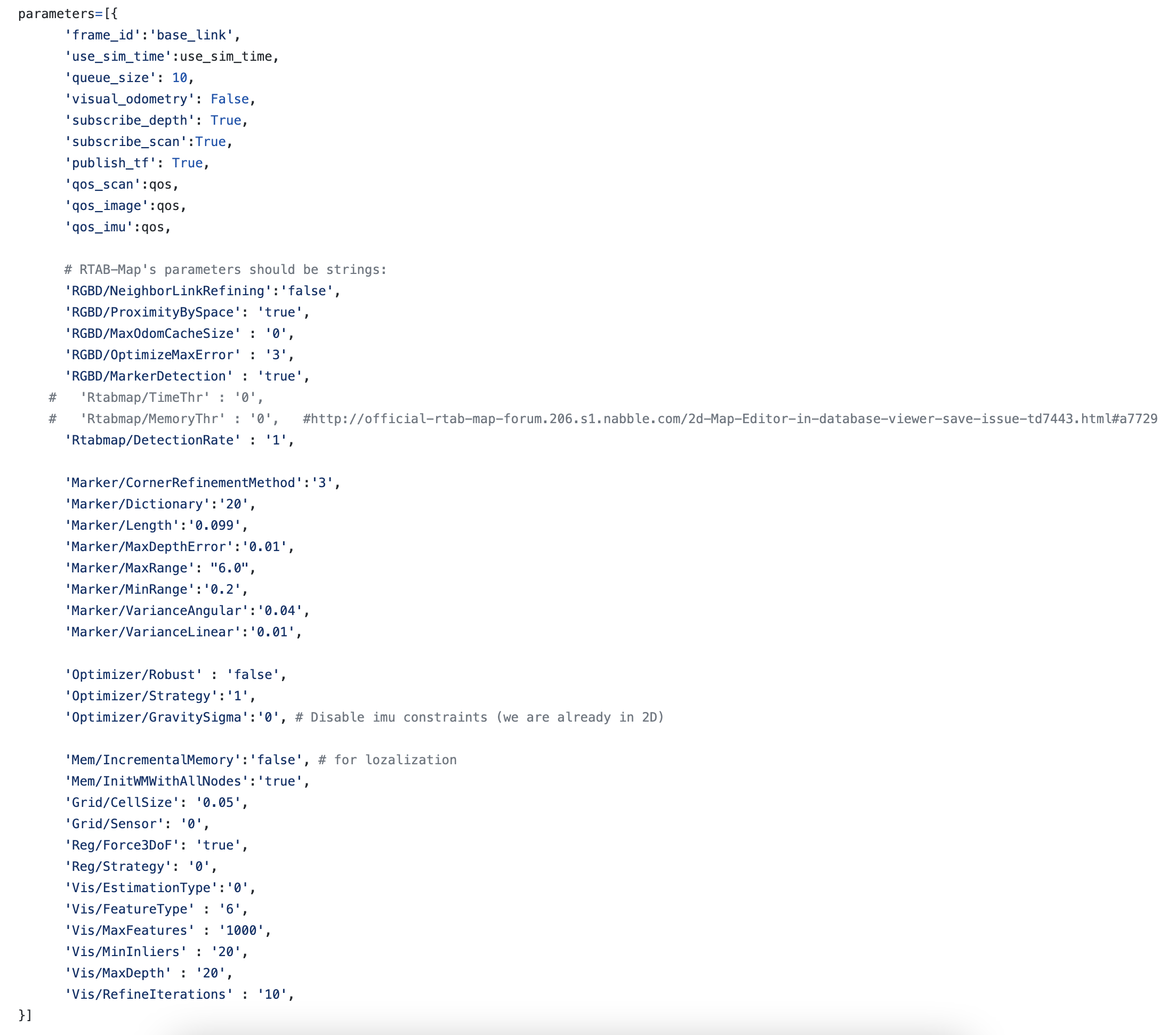
Below are the launch file at the time of map creation, the launch file at the time of localization.
The version of rtabmap we are currently using is 0.20.15.
1. Mapping Launch
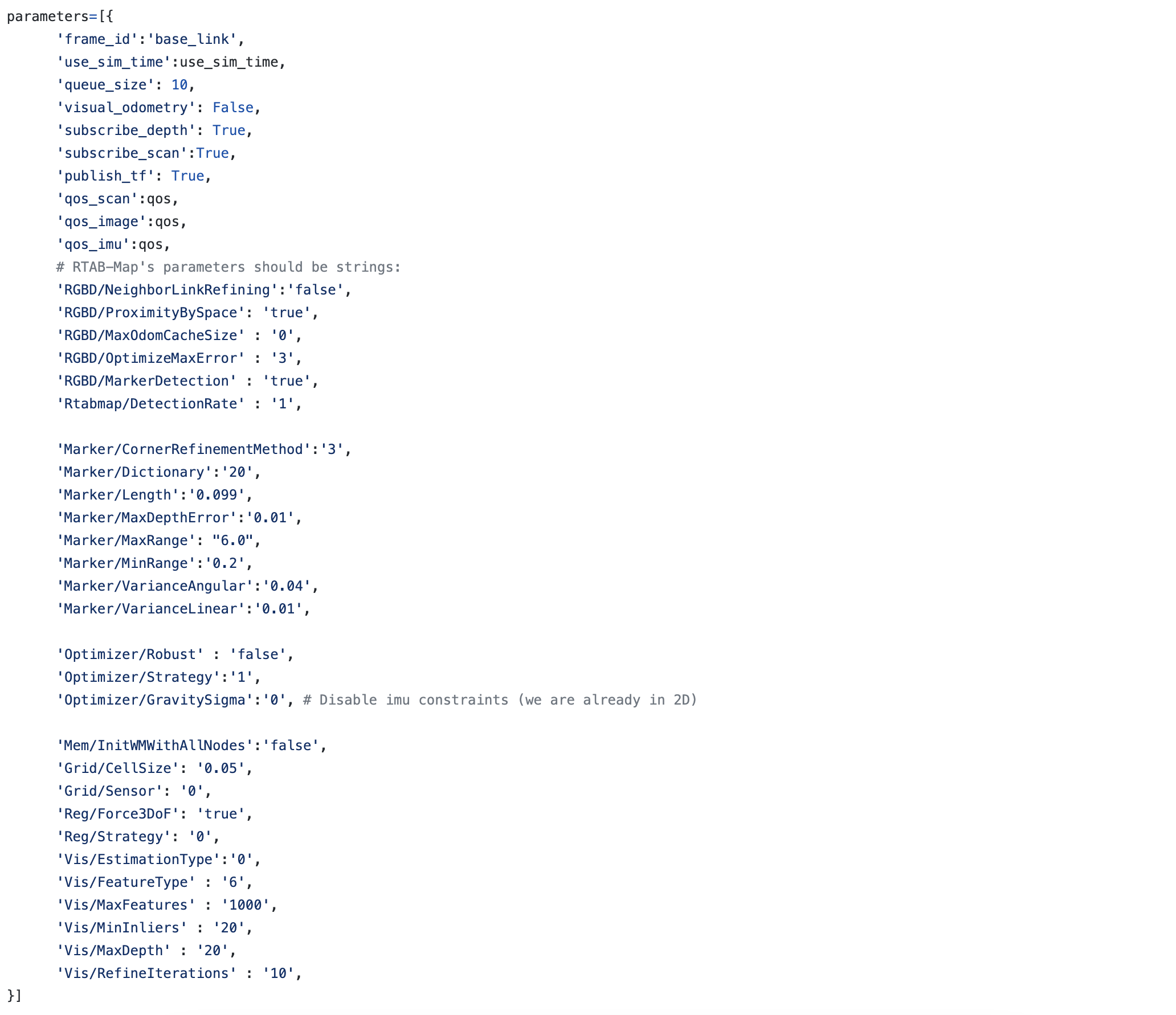
2. Localization Launch