|
|
My robot mapped an area and I had to edit the map produced in Rviz2 afterward in order to clean up some areas. I widened the "clear" area on some passageways since the mapping produced too much black. Then, when trying to do localization with Nav2, the modified map would come up in Rviz2 and after displaying the costmaps, the occupancy grid (map) would change to the unmodified one! I determined that it was coming from Rtabmap, since I didn't delete the rtabmap.db file. I have the launch file set to do localization, and assumed the database could remain and be helpful.
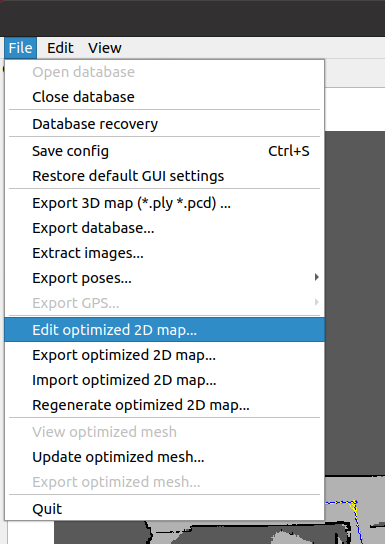
But, trying to get to that map and edit it as well, I couldn't get it to show in Database-viewer. Is there a way to edit that map? Is there a way to load the other one (already edited) into the database? Or should I just allow the launch file to delete the database?
|