Hi,
Unfortunately, I don't have a database available yet, as my SLAMdunk (I am still working with the slamdunk from parrot) started not to work since Friday evening (and I deleted my former one when I wanted to do a new mapping...).
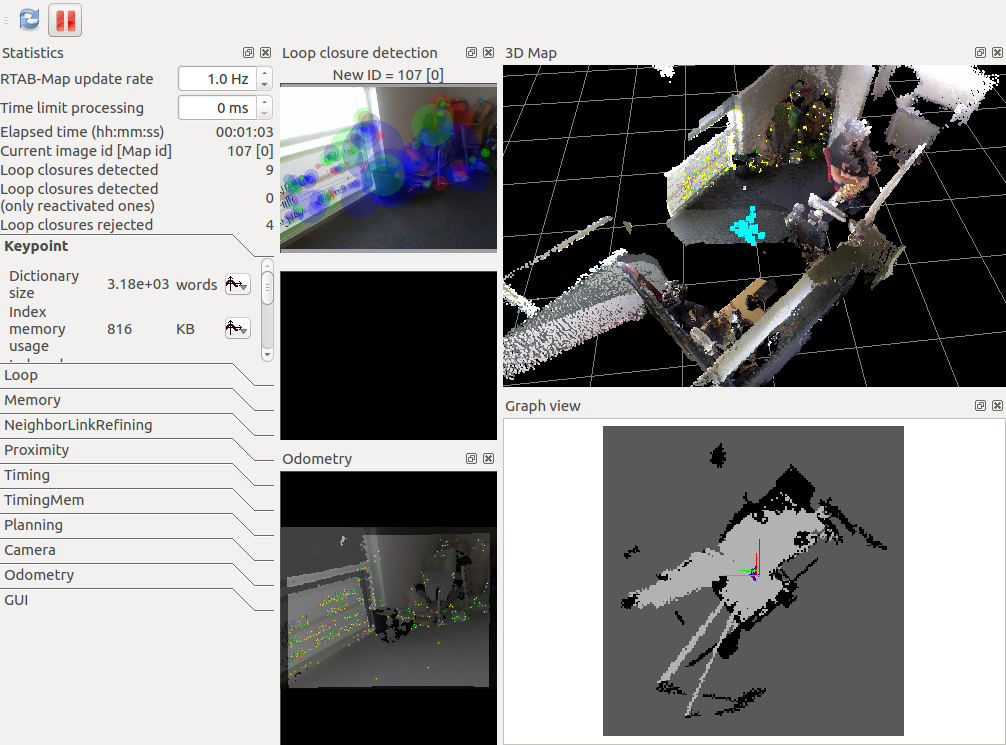
However I have a screenshot from a former mapping (where you can't see the white dotted lines).

As it is working on the drone, the camera is maybe ~1.10m above ground.
Do you think the lines are caused by the fact that the camera is seeing the floor/ceiling ?
Does the camera need to see the ground ?
If yes, it may explain why I have somethimes the white lines and the black lines across a corridor ?
Thank you.
Edit : I found in your papers the algorithm :)
PS : do you have a webpage where the algorithm is explained ? I mean, not the tutorials where you explain how to make RTABmap work, but a bit like what you did on this : http://wiki.ros.org/rtabmap_ros/Tutorials/SetupOnYourRobot
but with the program (for example rtabmap is launched, then it subscibes to the appropriate topics, then the image are analysed for the inliers etc...).
I am studying all the cpp files but as they are numerous it takes some time :)