Hello derwee,
it seems that the loop closure hypothesis is not high enough to trigger a loop closure. To see the loop closure hypotheses, you can show the "Likelihood" and "A Posteriori PDF" in Window menu -> Show view...
Example:
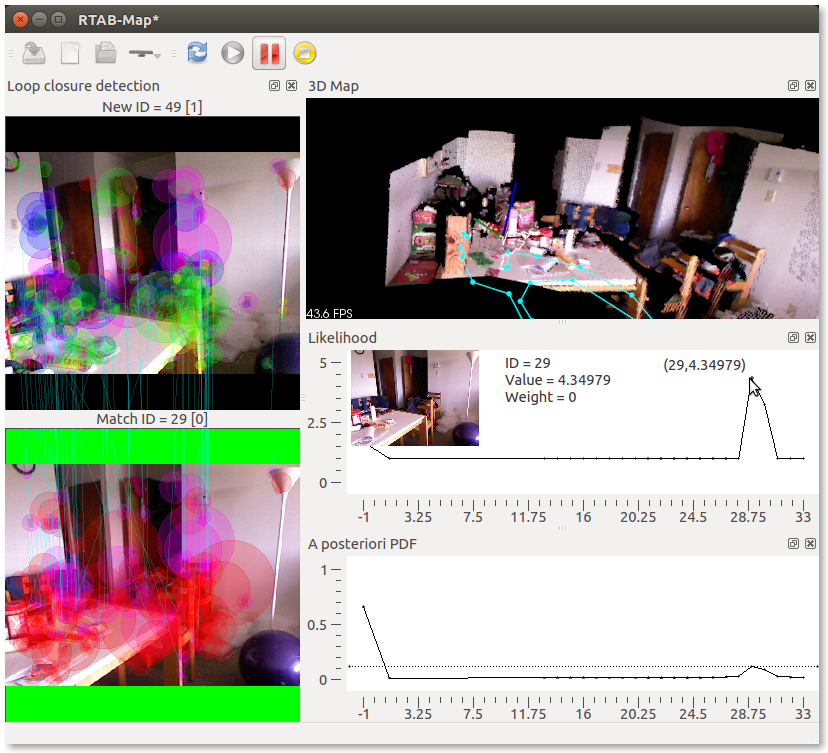
In "A posteriori PDF", the corresponding hypothesis of the old image should be near the threshold to trigger a loop closure (green background when accepted). You can set the plots in graphics view mode (see right-click menu) to show images related to each dot in the graph.
cheers