Hi,
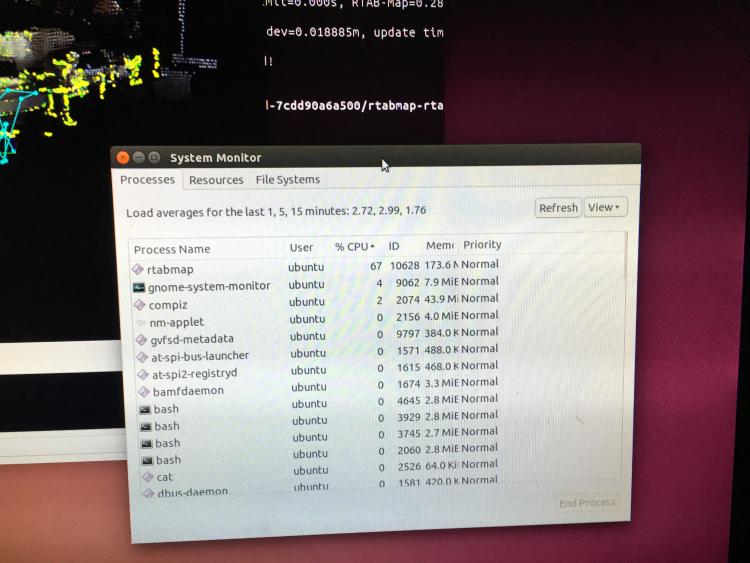
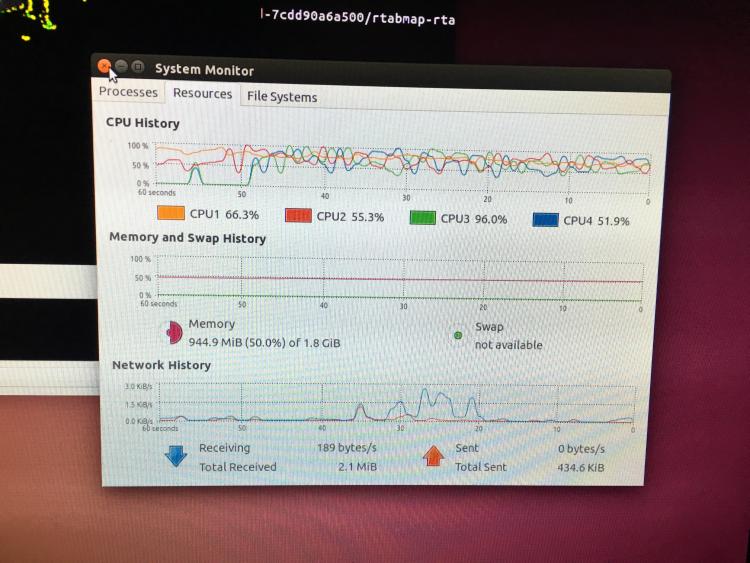
In the standalone version, there is no memory copy (or serialization/deserialization like in ROS) between the camera, odometry, rtabmap and gui modules.
If freenect_throttle.launch and rtabmap.launch are running on the same computer, I would not use "compressed:=true" argument to avoid compression time. You can also use "data_skip" argument of freenect.launch to limit the framerate instead of using freenect_throttle.launch. Note that you are limiting the framerate to 5 Hz in freenect_throttle.launch. On your standalone example, it seems that you are starting the camera at highest framerate.
A better comparison would be with:
$ roslaunch freenect_launch freenect.launch depth_registration:=true
$ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start"
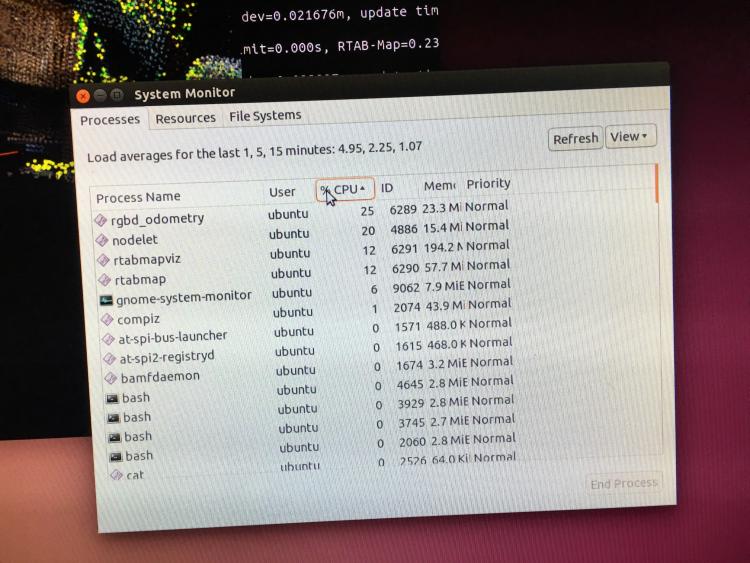
To avoid serialization/deserialization of the image topics between the modules, we should create rgbd_odometry, rtabmap and rtabmapviz nodes as nodelets. I opened an
issue for that.
cheers