HI Matlabbe,
I integrated my sensor and now getting pretty nice results! thanks for your support so far.
There's one more issue I couldn't solve yet - my depth cloud default orientation is wrong for some reason.
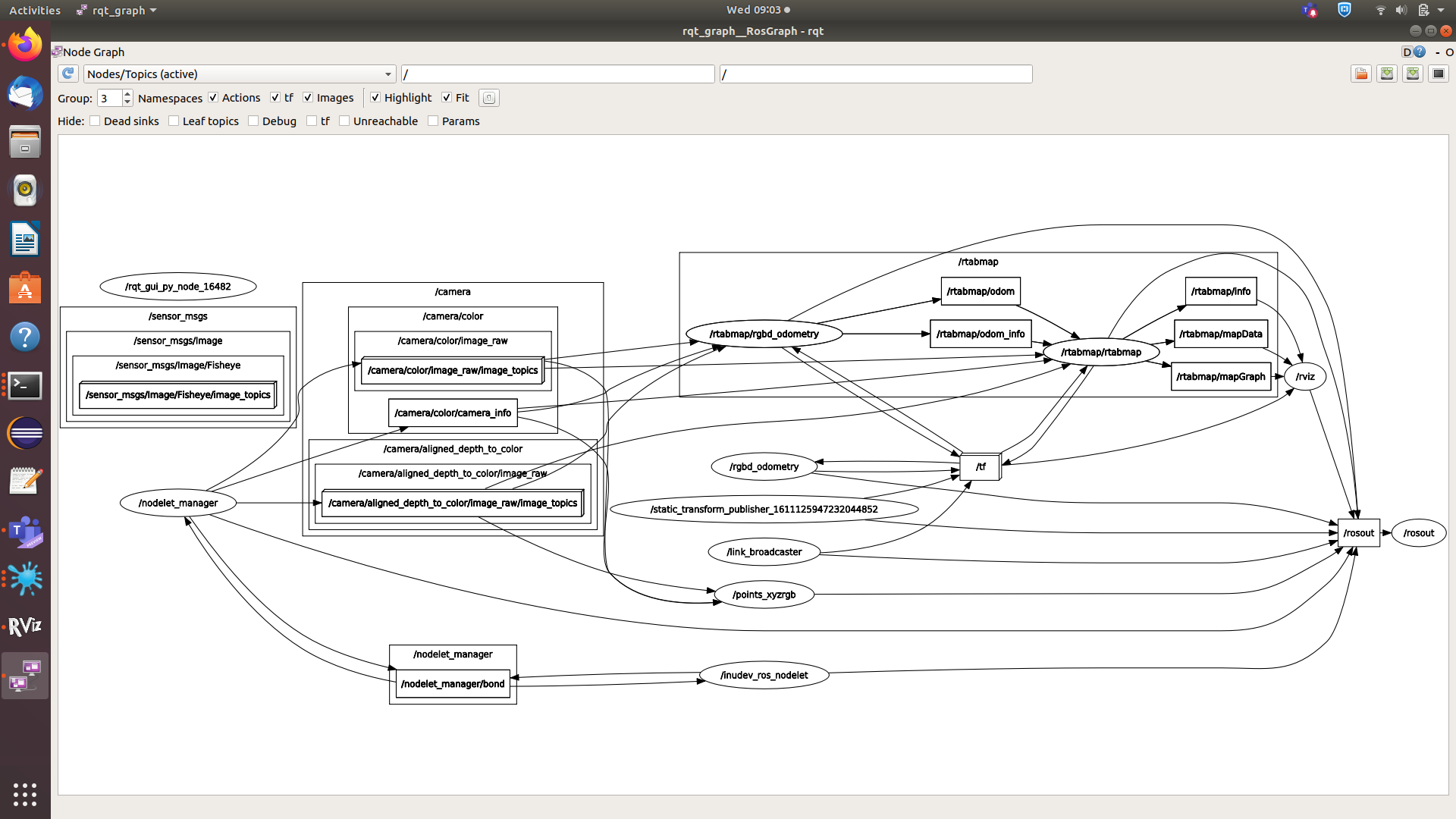
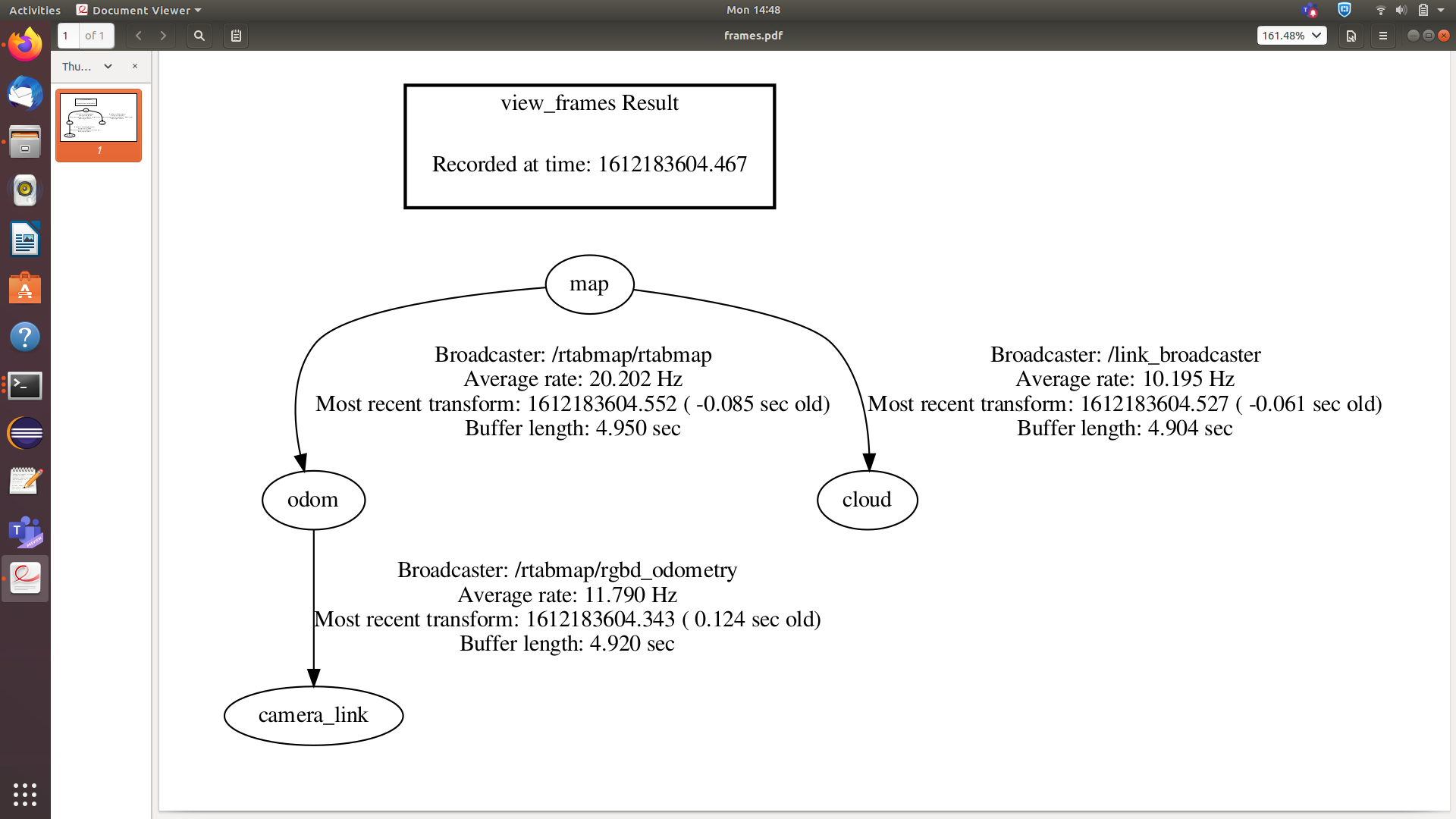
I am running RTAB with Realsense with the same parameters.
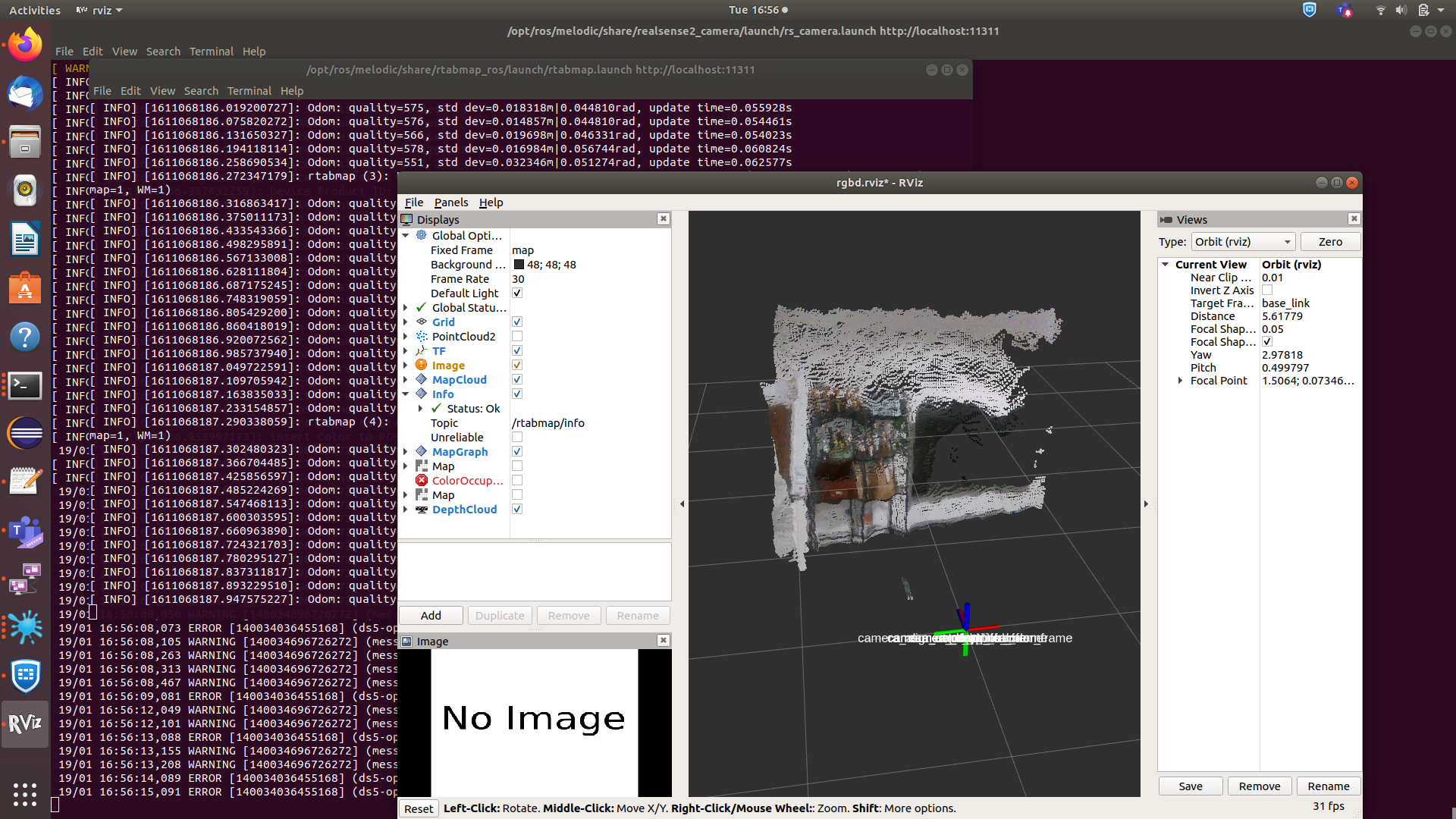
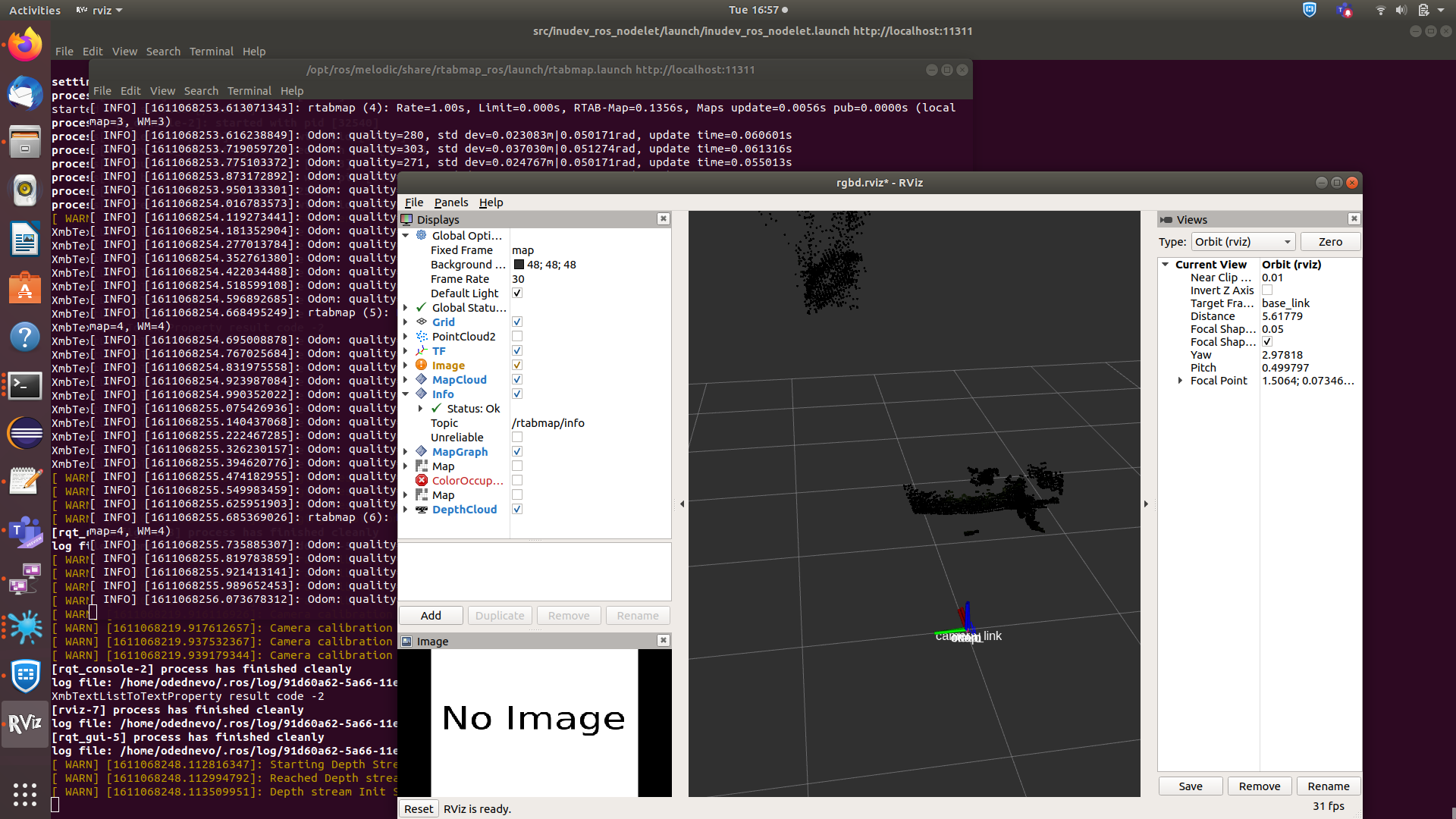
Real sense depth cloud orientation looks ok:
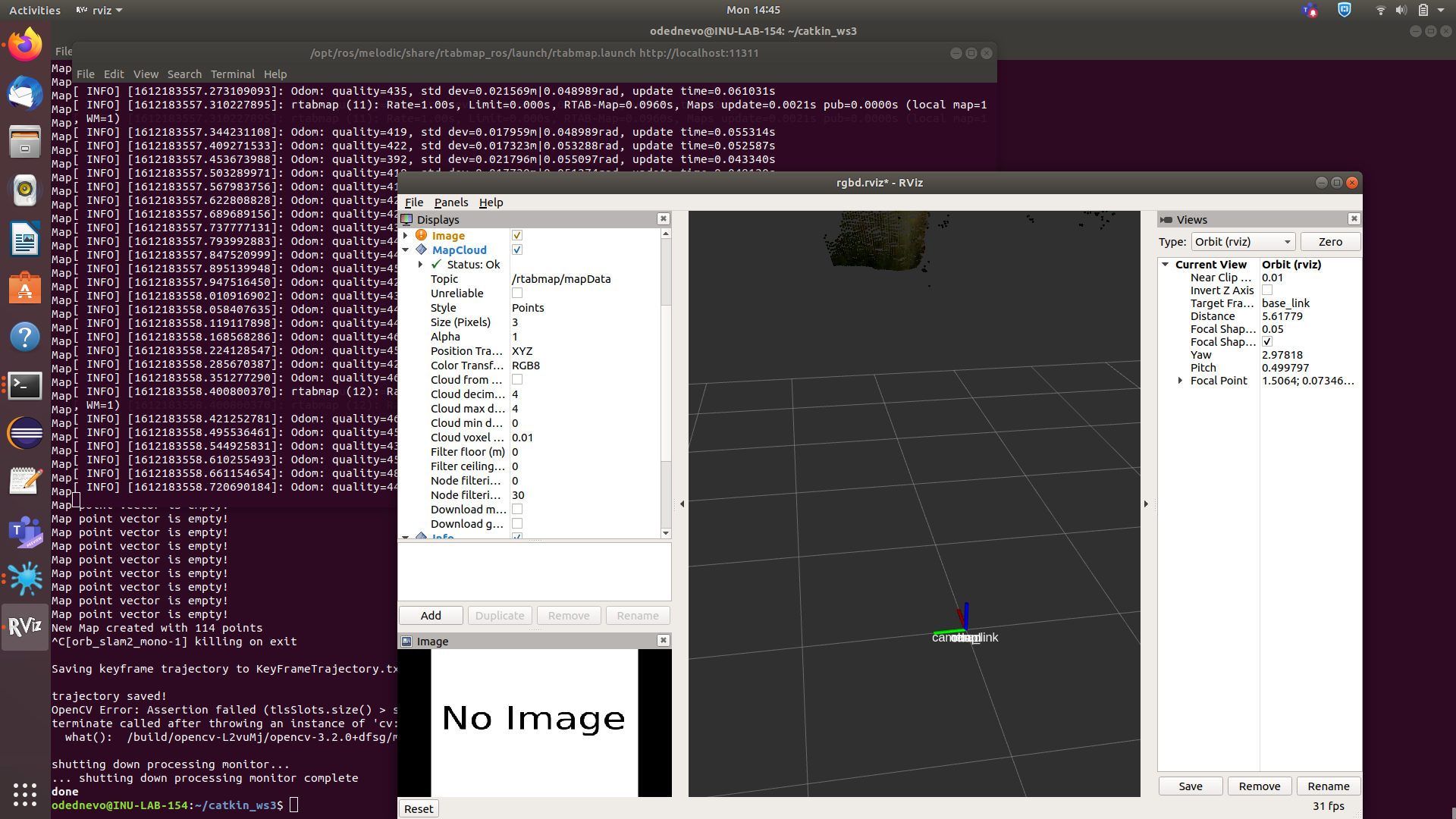
While, when using my sensor, it seems like the depth data is appears to be on the 'Y' axis:
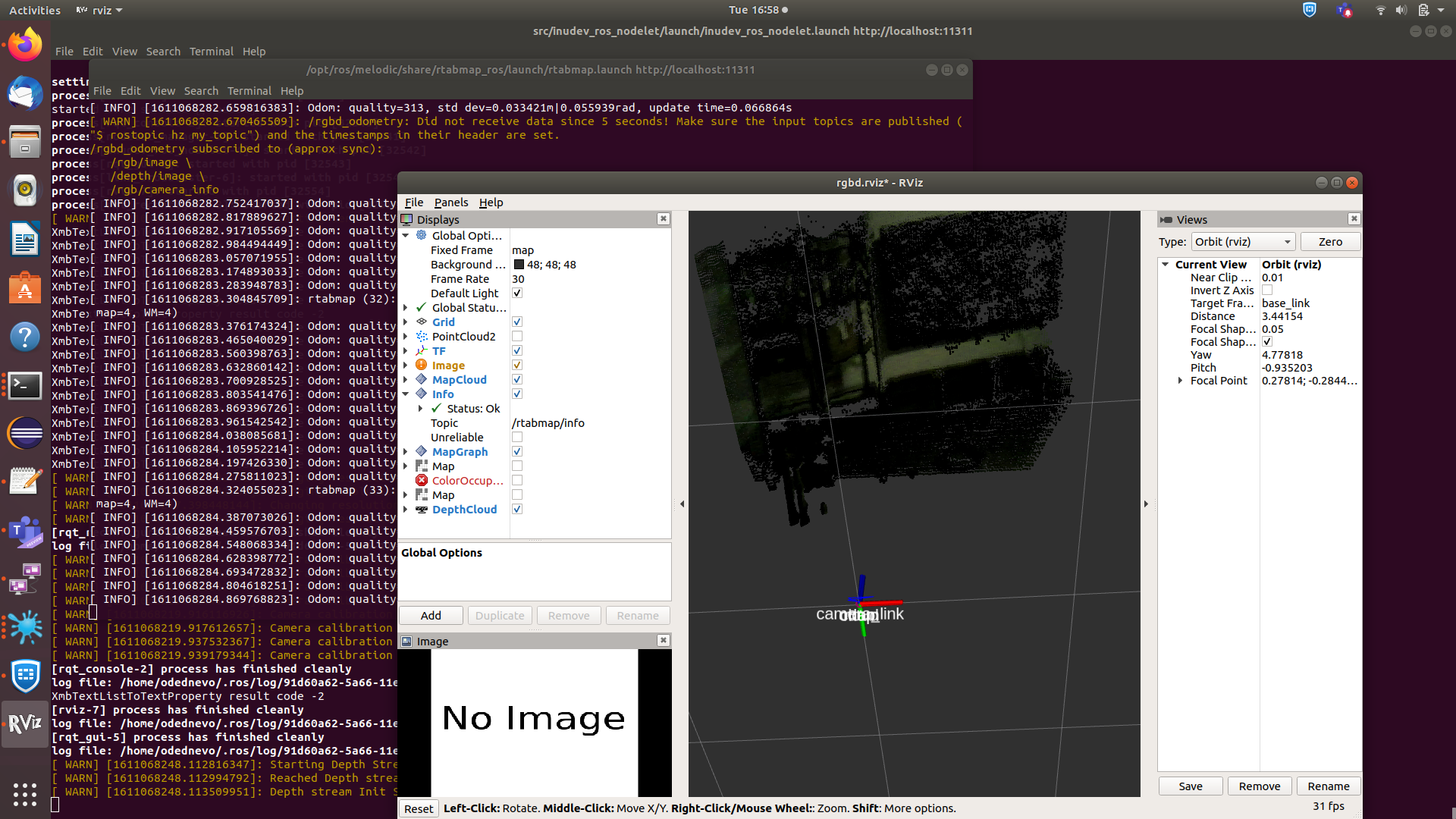
How can I change the orientation of the point cloud? shouldn't it always be presented on the 'Z' axis?
Any help is greatly appreciated.
Thanks,
Tamir.