Hi , i am using rtabmap with Zed stereo camera in mapping , using zed_wrapper package , this package publishes all topics that rtabmap needs and also publishing odometry , so i depend on visual odometry from my camera , but i have some issues with the map , the map is distorted like the image below :
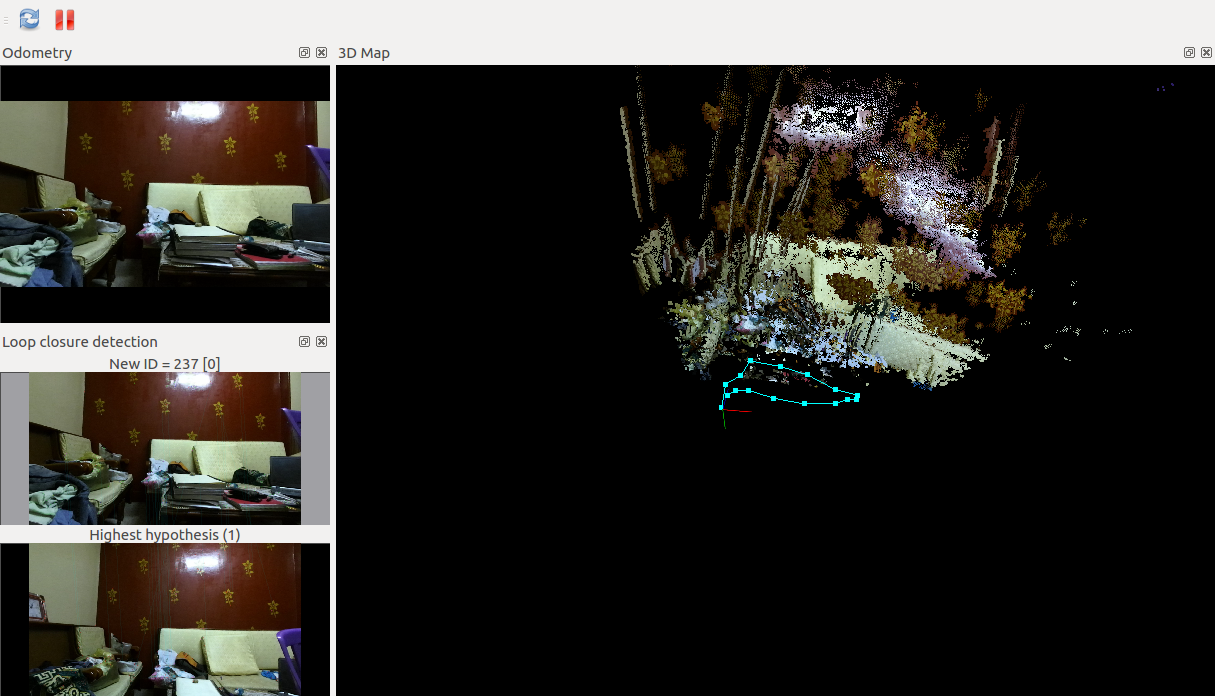
and when i move camera i got warning like that :

---------------------------------------------------------------------------------------------------------------------------------------------------
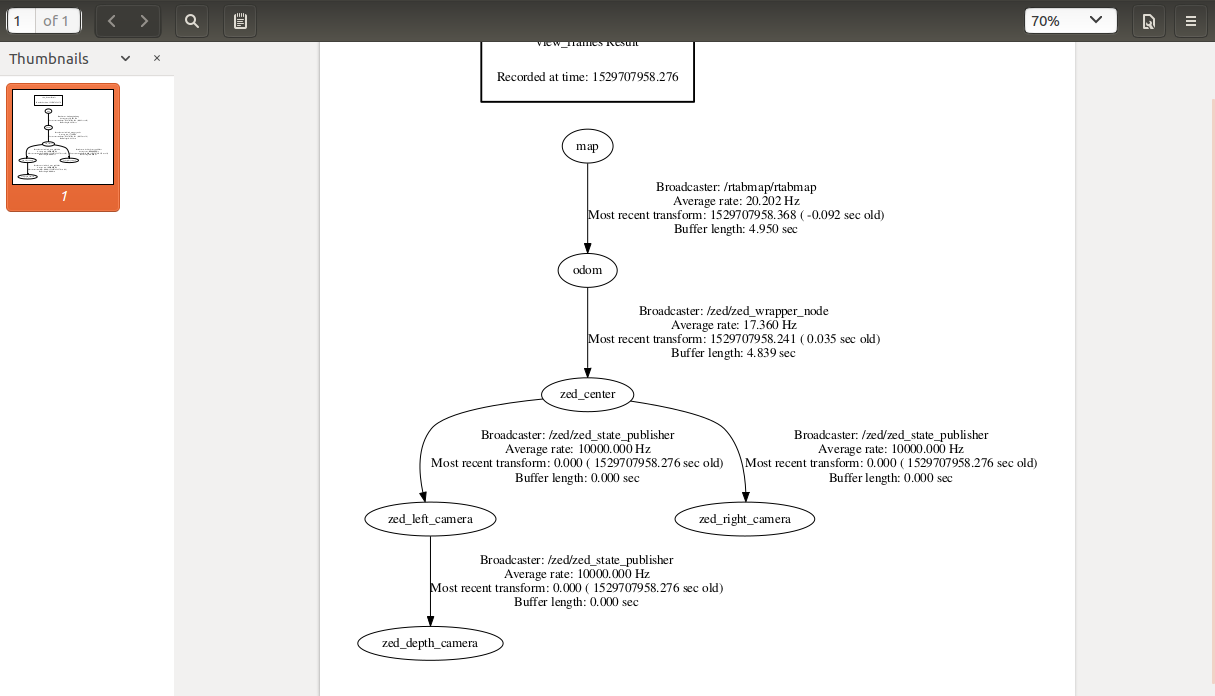
Here's my frames and transformations from tf view_frames:
---------------------------------------------------------------------------------------------------------------------------------------------------
Here's my launch files :
Zed.launch:
zed.launchrtabmap launch file:
indoor.launch


