Hi,
The 3D rendering problem is known on the jetpack, and explained in this
issue (if you want to read the 97 posts). There are workarounds like explained in this
comment, but I didn't keep up with latest jetpack versions to see if the workarounds are still working. I hope with jetpack 5 (on ubuntu 20.04), the opengl rendering problem will be fixed.
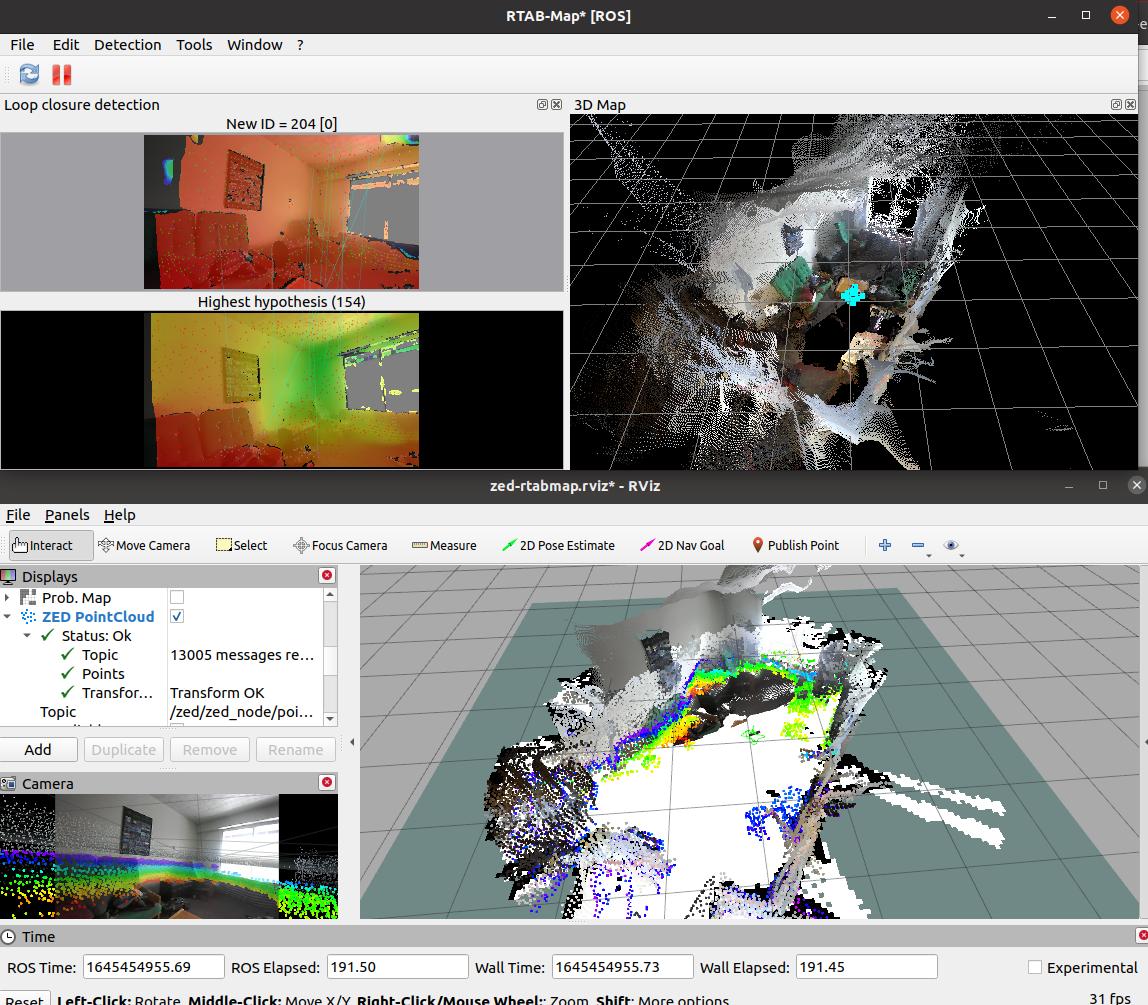
You don't need to launch rtabmapviz on the robot (it is better not to save computation time), if you are going to visualize on a laptop. We can launch rtabmapviz or rviz on laptop, though maybe more general to use rviz. When you say "just point cloud", which topic? zed point cloud? To debug topics not received on remote laptop, I generally do "rostopic hz /my/topic/name" on the robot and on the laptop to see if the topic is actually published by the robot and that the remote computer receives it. If topic is published on the robot but not received on the laptop, explicitly set the ROS_IP on both computers. When streaming images, it is better to test with ethernet than Wifi to avoid bandwidth problems. See also this
page about remote mapping (contains zed examples) This page shows also other
network issues that we can have.
cheers,
Mathieu