Hi Matlabbe,
I modified logic base /rtabmap/tools/CameraRGBD/main.cpp. This program read one rgb picture and depth picture from mobile phone at the same time instead of RGBD camera. We struggle with some problems.
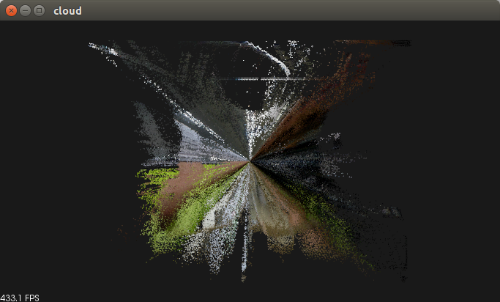
(1) The clound is out of shape easily, when amplifying or reducing
(2) depth image is repeated by piece
Is there something wrong with CameraModel or other cause? many thanks in advance.
rtabmap::Transform t1=rtabmap::Transform(0,0,1,0, -1,0,0,0, 0,-1,0,0);
rtabmap::CameraModel model(
570.342163, //fx
570.342224, //fy
319.500000, //cx
239.500000, //cy
t1);
cv::Mat depth;
depth =cv::Mat(480, 640, CV_16UC1,cv::imread("reeman_depth1.jpg").data);
rtabmap::SensorData data;
data.setCameraModel(model);
data.setDepthOrRightRaw(depth);
data.setImageRaw(cv::imread("reeman1.jpg"));
data.setId(0);
data.setStamp(1.0);