catkin_make error in rtabmap_ros installation


|
Hello,
I am trying to build rtabmap_ros using catkin_make following the instructions given here but I keep running into this error. it seems to be an opencv error to me but I have reinstalled opencv multiple times (with OPENCL=OFF as well) and have removed my build folder in catkin_ws as well and still I keep running into this error. Kindly tell me what the solution to this problem is. Regards 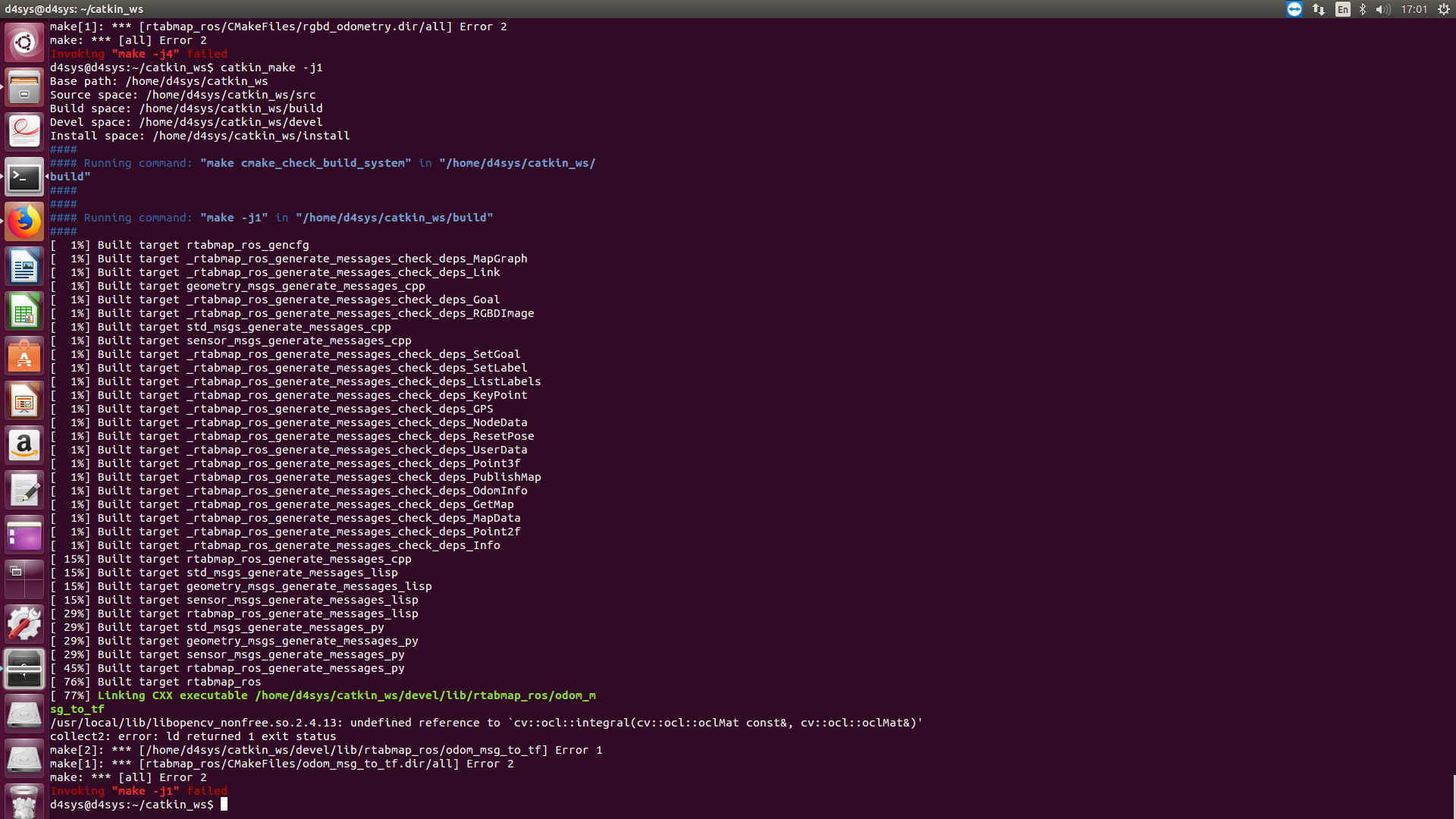
|
|
Administrator
|
This post was updated on .
It seems similar to http://official-rtab-map-forum.206.s1.nabble.com/catkin-make-ros-pkg-failed-tp22.html. What is your system?
|
|
|
Hello,
Thank you for replying. My system configuration is as follows; Ubuntu 14.04 OpenCV 2.4.13 Ros-Inidigo And I followed the instructions given here for installing RTABMap. RTABMap itself was first working with opencv 3.1.0 following the hand-held mapping instructions but gave the rgbd-odometry error as shown. With opencv 2.4.13.6, 2.4.9 and 2.4.13 it just gives the make -j4 error during installation. I tried installing opencv with OpenCL turned off and then also changed the CMakeLists.txt file so it looks for OpenCV first then catkin_Libraries in include_directories and target_link_libraries functions. Regards |
|
|
Hello,
I tried it again with a fresh install of ros-indigo and catkin workspace with Opencv 2.4.9 using the steps here and it built fine. But during the step to update it to new version it gave the this error during roscd rtabmap_ros roscd: No such package/stack 'rtabmap_ros' When I went manually in the directory and used git pull origin masterit said it was up to date. Then during catkin_make --pkg rtabmap_rosit gave said The specified source space "/opt/ros/src" does not exist When I try running rtabmap it just gives Segmentation fault (core dumped) 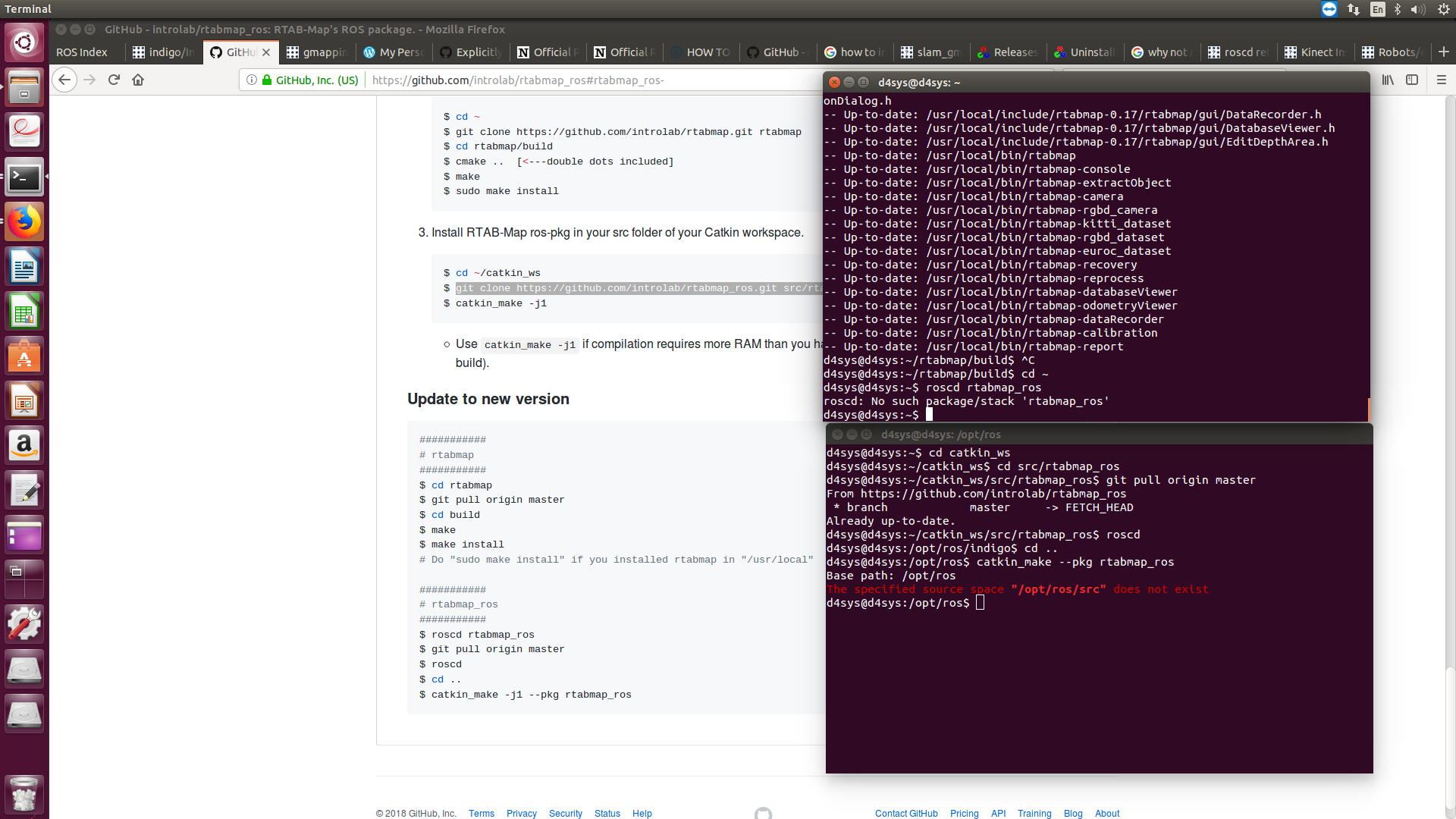
|
|
Administrator
|
Hi,
I don't think your catkin workspace is correctly configured (roscd should go in ~/catkin_ws/devel, not /opt/ros/src). See http://wiki.ros.org/catkin/Tutorials/create_a_workspace The rtabmap_ros installation instructions assume (see step before 0 on this page) that your catkin_ws is correctly configured and that ~/catkin_ws/devel/setup.bash is sourced following the link above. Can you try skipping step 1 of the installation instructions to make sure you can run rtabmap built from source using the default dependencies? For the seg fault on rtabmap standalone, run it with gdb and output the crash log: $ gdb rtabmap ... type "run" ... wait until crash ... type "bt" ... copy/paste the log on the forum cheers, Mathieu |
|
|
when we are running rtabmap_ros then its giving the following error:
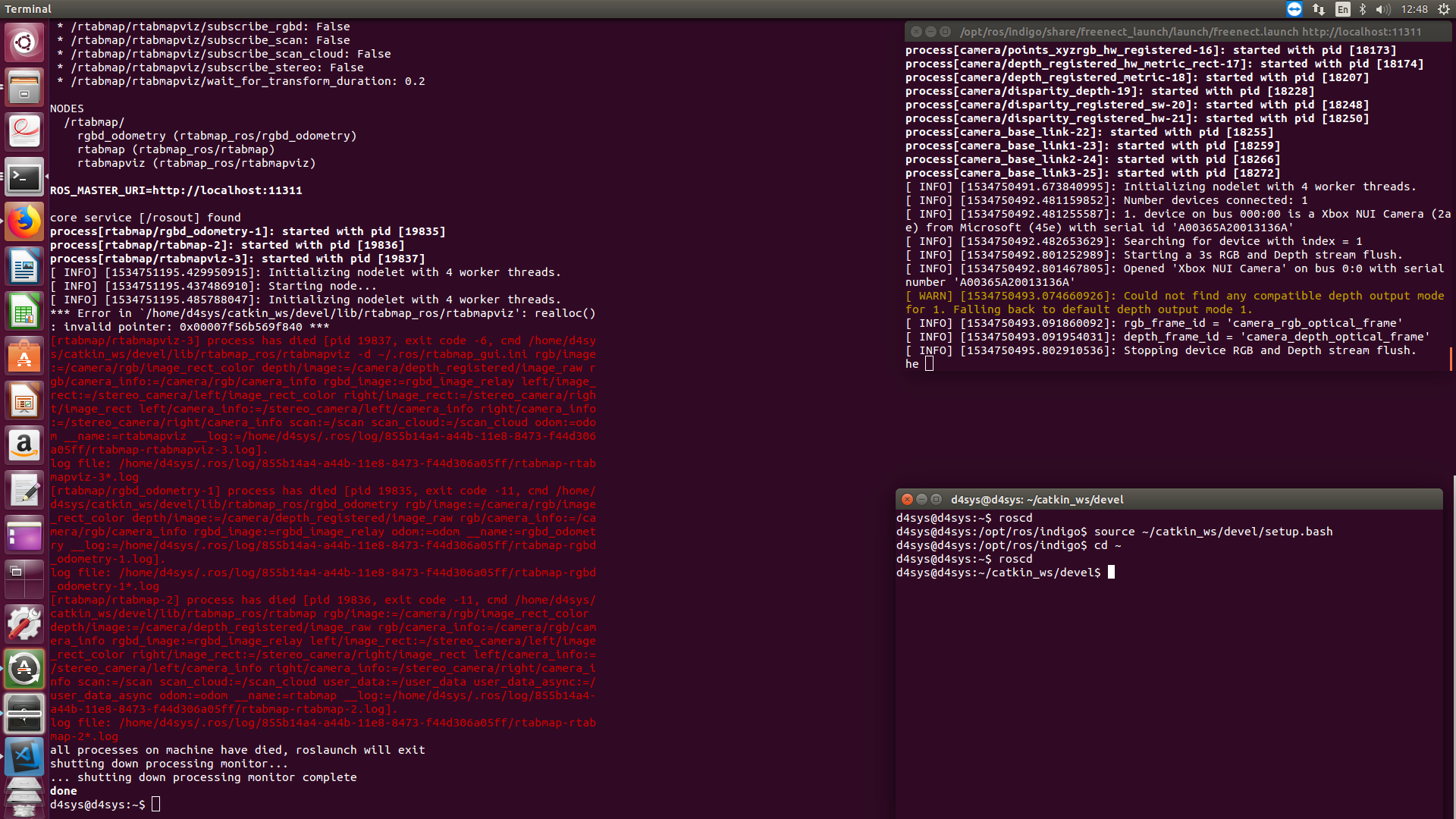 when running rtabmap itself its giving error for segmentation and when I open a new terminal and run roscd it goes to the ros/opt/indigo directory. Thank you for your help. |
|
Administrator
|
Hi you may have to start the nodes with gdb (see this page) to see more info. Can you also do ldd on rtabmap library to see any problems with the linker?
$ ldd /home/d4sys/catkin_ws/devel/lib/librtabmap_ros.so(Please copy/paste the text, not a screenshot of the text) |
|
|
Hi when starting roslaunch nodes with gdb:-
launch-prefix="stterm -g 200x60 -e gdb -ex run --args Its giving no error. I didnt use this because its giving the following error :- launch-prefix=xterm -e gdb --args: command not found When using ulimit -a its shows the following:- core file size (blocks, -c) 0 data seg size (kbytes, -d) unlimited scheduling priority (-e) 0 file size (blocks, -f) unlimited pending signals (-i) 27262 max locked memory (kbytes, -l) 64 max memory size (kbytes, -m) unlimited open files (-n) 1024 pipe size (512 bytes, -p) 8 POSIX message queues (bytes, -q) 819200 real-time priority (-r) 0 stack size (kbytes, -s) 8192 cpu time (seconds, -t) unlimited max user processes (-u) 27262 virtual memory (kbytes, -v) unlimited file locks (-x) unlimited d4sys@d4sys:~$ ulimit -c unlimited d4sys@d4sys:~$ echo 1 > /proc/sys/kernel/core_uses_pid bash: /proc/sys/kernel/core_uses_pid: Permission denied d4sys@d4sys:~$ #!/bin/sh d4sys@d4sys:~$ tmux new-window "gdb --args $*" failed to connect to server Also when using this command :- echo 1 > /proc/sys/kernel/core_uses_pid the following error comes up: bash: /proc/sys/kernel/core_uses_pid: Permission denied |
|
|
In reply to this post by matlabbe
It is giving the following output when running this command ;
$ ldd /home/d4sys/catkin_ws/devel/lib/librtabmap_ros.so The following is what it shows : linux-vdso.so.1 => (0x00007ffdd5fe5000) libtf.so => /opt/ros/indigo/lib/libtf.so (0x00007f874e72a000) libtf2_ros.so => /opt/ros/indigo/lib/libtf2_ros.so (0x00007f874e488000) libactionlib.so => /opt/ros/indigo/lib/libactionlib.so (0x00007f874e26b000) libmessage_filters.so => /opt/ros/indigo/lib/libmessage_filters.so (0x00007f874e066000) libroscpp.so => /opt/ros/indigo/lib/libroscpp.so (0x00007f874dd01000) libboost_filesystem.so.1.54.0 => /usr/lib/x86_64-linux-gnu/libboost_filesystem.so.1.54.0 (0x00007f874daeb000) librosconsole.so => /opt/ros/indigo/lib/librosconsole.so (0x00007f874d8bf000) libroscpp_serialization.so => /opt/ros/indigo/lib/libroscpp_serialization.so (0x00007f874d6bc000) librostime.so => /opt/ros/indigo/lib/librostime.so (0x00007f874d492000) libboost_system.so.1.54.0 => /usr/lib/x86_64-linux-gnu/libboost_system.so.1.54.0 (0x00007f874d28e000) libboost_thread.so.1.54.0 => /usr/lib/x86_64-linux-gnu/libboost_thread.so.1.54.0 (0x00007f874d078000) libpthread.so.0 => /lib/x86_64-linux-gnu/libpthread.so.0 (0x00007f874ce5a000) libconsole_bridge.so.0.2 => /usr/lib/x86_64-linux-gnu/libconsole_bridge.so.0.2 (0x00007f874cc50000) libcostmap_2d.so => /opt/ros/indigo/lib/libcostmap_2d.so (0x00007f874c9bb000) liblaser_geometry.so => /opt/ros/indigo/lib/liblaser_geometry.so (0x00007f874c7a9000) libpcl_ros_tf.so => /opt/ros/indigo/lib/libpcl_ros_tf.so (0x00007f874c585000) libpcl_common.so.1.7 => /usr/lib/libpcl_common.so.1.7 (0x00007f874c2d1000) libpcl_filters.so.1.7 => /usr/lib/libpcl_filters.so.1.7 (0x00007f874b9f2000) libpcl_segmentation.so.1.7 => /usr/lib/libpcl_segmentation.so.1.7 (0x00007f874ae67000) libdynamic_reconfigure_config_init_mutex.so => /opt/ros/indigo/lib/libdynamic_reconfigure_config_init_mutex.so (0x00007f874ac61000) libnodeletlib.so => /opt/ros/indigo/lib/libnodeletlib.so (0x00007f874aa05000) libclass_loader.so => /opt/ros/indigo/lib/libclass_loader.so (0x00007f874a7e6000) libroslib.so => /opt/ros/indigo/lib/libroslib.so (0x00007f874a5d4000) libtinyxml.so.2.6.2 => /usr/lib/x86_64-linux-gnu/libtinyxml.so.2.6.2 (0x00007f874a3bf000) libcv_bridge.so => /opt/ros/indigo/lib/libcv_bridge.so (0x00007f874a19d000) libimage_transport.so => /opt/ros/indigo/lib/libimage_transport.so (0x00007f8749f27000) libtf_conversions.so => /opt/ros/indigo/lib/libtf_conversions.so (0x00007f8749d23000) libeigen_conversions.so => /opt/ros/indigo/lib/libeigen_conversions.so (0x00007f8749b1e000) libimage_geometry.so => /opt/ros/indigo/lib/libimage_geometry.so (0x00007f8749912000) libopencv_core.so.2.4 => /usr/local/lib/libopencv_core.so.2.4 (0x00007f8749477000) librtabmap_core.so.0.17 => /usr/local/lib/librtabmap_core.so.0.17 (0x00007f8748b70000) librtabmap_utilite.so.0.17 => /usr/local/lib/librtabmap_utilite.so.0.17 (0x00007f8748950000) libQtGui.so.4 => /usr/lib/x86_64-linux-gnu/libQtGui.so.4 (0x00007f8747c9d000) libQtCore.so.4 => /usr/lib/x86_64-linux-gnu/libQtCore.so.4 (0x00007f87477b8000) librviz.so => /opt/ros/indigo/lib/librviz.so (0x00007f874739e000) libOgreMain.so.1.8.1 => /usr/lib/x86_64-linux-gnu/libOgreMain.so.1.8.1 (0x00007f8746cd1000) libdefault_plugin.so => /opt/ros/indigo/lib/libdefault_plugin.so (0x00007f8746619000) libstdc++.so.6 => /usr/lib/x86_64-linux-gnu/libstdc++.so.6 (0x00007f8746315000) libm.so.6 => /lib/x86_64-linux-gnu/libm.so.6 (0x00007f874600f000) libgcc_s.so.1 => /lib/x86_64-linux-gnu/libgcc_s.so.1 (0x00007f8745df9000) libc.so.6 => /lib/x86_64-linux-gnu/libc.so.6 (0x00007f8745a30000) libtf2.so => /opt/ros/indigo/lib/libtf2.so (0x00007f87457fc000) libxmlrpcpp.so => /opt/ros/indigo/lib/libxmlrpcpp.so (0x00007f87455de000) libcpp_common.so => /opt/ros/indigo/lib/libcpp_common.so (0x00007f87453d6000) librosconsole_log4cxx.so => /opt/ros/indigo/lib/librosconsole_log4cxx.so (0x00007f87451c2000) librosconsole_backend_interface.so => /opt/ros/indigo/lib/librosconsole_backend_interface.so (0x00007f8744fc0000) liblog4cxx.so.10 => /usr/lib/liblog4cxx.so.10 (0x00007f8744bd8000) libboost_regex.so.1.54.0 => /usr/lib/x86_64-linux-gnu/libboost_regex.so.1.54.0 (0x00007f87448d1000) librt.so.1 => /lib/x86_64-linux-gnu/librt.so.1 (0x00007f87446c9000) /lib64/ld-linux-x86-64.so.2 (0x00007f875434c000) libgomp.so.1 => /usr/lib/x86_64-linux-gnu/libgomp.so.1 (0x00007f87444ba000) libpcl_sample_consensus.so.1.7 => /usr/lib/libpcl_sample_consensus.so.1.7 (0x00007f87438b9000) libpcl_search.so.1.7 => /usr/lib/libpcl_search.so.1.7 (0x00007f874350e000) libpcl_kdtree.so.1.7 => /usr/lib/libpcl_kdtree.so.1.7 (0x00007f87431e7000) libpcl_octree.so.1.7 => /usr/lib/libpcl_octree.so.1.7 (0x00007f8742dfa000) libbondcpp.so => /opt/ros/indigo/lib/libbondcpp.so (0x00007f8742bca000) libPocoFoundation.so.9 => /usr/lib/libPocoFoundation.so.9 (0x00007f874287a000) librospack.so => /opt/ros/indigo/lib/librospack.so (0x00007f874263a000) libopencv_imgproc.so.2.4 => /usr/local/lib/libopencv_imgproc.so.2.4 (0x00007f8742142000) libopencv_highgui.so.2.4 => /usr/local/lib/libopencv_highgui.so.2.4 (0x00007f8741eaa000) libopencv_contrib.so.2.4 => /usr/local/lib/libopencv_contrib.so.2.4 (0x00007f8741bb2000) libkdl_conversions.so => /opt/ros/indigo/lib/libkdl_conversions.so (0x00007f87419af000) liborocos-kdl.so.1.3 => /opt/ros/indigo/lib/liborocos-kdl.so.1.3 (0x00007f8741731000) libopencv_calib3d.so.2.4 => /usr/local/lib/libopencv_calib3d.so.2.4 (0x00007f8741491000) libz.so.1 => /lib/x86_64-linux-gnu/libz.so.1 (0x00007f8741278000) libGL.so.1 => /usr/lib/x86_64-linux-gnu/mesa/libGL.so.1 (0x00007f8741010000) libtbb.so.2 => /usr/lib/libtbb.so.2 (0x00007f8740ddc000) libOpenNI2.so.0 => /usr/lib/libOpenNI2.so.0 (0x00007f8740b81000) libpcl_io.so.1.7 => /usr/lib/libpcl_io.so.1.7 (0x00007f87406c9000) libpcl_surface.so.1.7 => /usr/lib/libpcl_surface.so.1.7 (0x00007f87400a6000) libpcl_features.so.1.7 => /usr/lib/libpcl_features.so.1.7 (0x00007f873e5a8000) libfreenect.so.0.2 => /usr/lib/x86_64-linux-gnu/libfreenect.so.0.2 (0x00007f873e39d000) libdc1394.so.22 => /usr/lib/x86_64-linux-gnu/libdc1394.so.22 (0x00007f873e129000) liboctomap.so.1.6 => /opt/ros/indigo/lib/liboctomap.so.1.6 (0x00007f873dee1000) liboctomath.so.1.6 => /opt/ros/indigo/lib/liboctomath.so.1.6 (0x00007f873dcdb000) libopencv_nonfree.so.2.4 => /usr/local/lib/libopencv_nonfree.so.2.4 (0x00007f873dabd000) libopencv_gpu.so.2.4 => /usr/local/lib/libopencv_gpu.so.2.4 (0x00007f873d872000) libopencv_video.so.2.4 => /usr/local/lib/libopencv_video.so.2.4 (0x00007f873d619000) libopencv_features2d.so.2.4 => /usr/local/lib/libopencv_features2d.so.2.4 (0x00007f873d369000) libvtkCommon.so.5.8 => /usr/lib/libvtkCommon.so.5.8 (0x00007f873cdf3000) libdl.so.2 => /lib/x86_64-linux-gnu/libdl.so.2 (0x00007f873cbef000) libfontconfig.so.1 => /usr/lib/x86_64-linux-gnu/libfontconfig.so.1 (0x00007f873c9b3000) libaudio.so.2 => /usr/lib/x86_64-linux-gnu/libaudio.so.2 (0x00007f873c79b000) libglib-2.0.so.0 => /lib/x86_64-linux-gnu/libglib-2.0.so.0 (0x00007f873c493000) libpng12.so.0 => /lib/x86_64-linux-gnu/libpng12.so.0 (0x00007f873c26d000) libfreetype.so.6 => /usr/lib/x86_64-linux-gnu/libfreetype.so.6 (0x00007f873bfca000) libgobject-2.0.so.0 => /usr/lib/x86_64-linux-gnu/libgobject-2.0.so.0 (0x00007f873bd79000) libSM.so.6 => /usr/lib/x86_64-linux-gnu/libSM.so.6 (0x00007f873bb71000) libICE.so.6 => /usr/lib/x86_64-linux-gnu/libICE.so.6 (0x00007f873b955000) libXi.so.6 => /usr/lib/x86_64-linux-gnu/libXi.so.6 (0x00007f873b745000) libXrender.so.1 => /usr/lib/x86_64-linux-gnu/libXrender.so.1 (0x00007f873b53b000) libXext.so.6 => /usr/lib/x86_64-linux-gnu/libXext.so.6 (0x00007f873b329000) libX11.so.6 => /usr/lib/x86_64-linux-gnu/libX11.so.6 (0x00007f873aff4000) libboost_program_options.so.1.54.0 => /usr/lib/x86_64-linux-gnu/libboost_program_options.so.1.54.0 (0x00007f873ad86000) libresource_retriever.so => /opt/ros/indigo/lib/libresource_retriever.so (0x00007f873ab80000) libassimp.so.3 => /usr/lib/libassimp.so.3 (0x00007f873a30a000) libyaml-cpp.so.0.5 => /usr/lib/x86_64-linux-gnu/libyaml-cpp.so.0.5 (0x00007f873a08a000) libXt.so.6 => /usr/lib/x86_64-linux-gnu/libXt.so.6 (0x00007f8739e24000) libXaw.so.7 => /usr/lib/x86_64-linux-gnu/libXaw.so.7 (0x00007f8739bb3000) libfreeimage.so.3 => /usr/lib/libfreeimage.so.3 (0x00007f873990b000) libzzip-0.so.13 => /usr/lib/x86_64-linux-gnu/libzzip-0.so.13 (0x00007f8739704000) libinteractive_markers.so => /opt/ros/indigo/lib/libinteractive_markers.so (0x00007f8739488000) liburdf.so => /opt/ros/indigo/lib/liburdf.so (0x00007f873925b000) liburdfdom_world.so.0.2 => /usr/lib/x86_64-linux-gnu/liburdfdom_world.so.0.2 (0x00007f873902e000) libaprutil-1.so.0 => /usr/lib/x86_64-linux-gnu/libaprutil-1.so.0 (0x00007f8738e07000) libapr-1.so.0 => /usr/lib/x86_64-linux-gnu/libapr-1.so.0 (0x00007f8738bd6000) libicuuc.so.52 => /usr/lib/x86_64-linux-gnu/libicuuc.so.52 (0x00007f873885d000) libicui18n.so.52 => /usr/lib/x86_64-linux-gnu/libicui18n.so.52 (0x00007f8738456000) libuuid.so.1 => /lib/x86_64-linux-gnu/libuuid.so.1 (0x00007f8738251000) libpcre.so.3 => /lib/x86_64-linux-gnu/libpcre.so.3 (0x00007f8738013000) libpython2.7.so.1.0 => /usr/lib/x86_64-linux-gnu/libpython2.7.so.1.0 (0x00007f8737aaf000) libjpeg.so.8 => /usr/lib/x86_64-linux-gnu/libjpeg.so.8 (0x00007f873785a000) libtiff.so.5 => /usr/lib/x86_64-linux-gnu/libtiff.so.5 (0x00007f87375e7000) libjasper.so.1 => /usr/lib/x86_64-linux-gnu/libjasper.so.1 (0x00007f873738f000) libIlmImf.so.6 => /usr/lib/x86_64-linux-gnu/libIlmImf.so.6 (0x00007f87370e0000) libHalf.so.6 => /usr/lib/x86_64-linux-gnu/libHalf.so.6 (0x00007f8736e9d000) libgstreamer-0.10.so.0 => /usr/lib/x86_64-linux-gnu/libgstreamer-0.10.so.0 (0x00007f8736bb3000) libgstapp-0.10.so.0 => /usr/lib/x86_64-linux-gnu/libgstapp-0.10.so.0 (0x00007f87369a7000) libgstvideo-0.10.so.0 => /usr/lib/x86_64-linux-gnu/libgstvideo-0.10.so.0 (0x00007f873678b000) libv4l1.so.0 => /usr/lib/x86_64-linux-gnu/libv4l1.so.0 (0x00007f8736585000) libavcodec.so.54 => /usr/lib/x86_64-linux-gnu/libavcodec.so.54 (0x00007f8735830000) libavformat.so.54 => /usr/lib/x86_64-linux-gnu/libavformat.so.54 (0x00007f873550e000) libavutil.so.52 => /usr/lib/x86_64-linux-gnu/libavutil.so.52 (0x00007f87352e9000) libswscale.so.2 => /usr/lib/x86_64-linux-gnu/libswscale.so.2 (0x00007f87350a2000) libQt5Test.so.5 => /usr/lib/x86_64-linux-gnu/libQt5Test.so.5 (0x00007f8734e79000) libQt5OpenGL.so.5 => /usr/lib/x86_64-linux-gnu/libQt5OpenGL.so.5 (0x00007f8734c15000) libQt5Widgets.so.5 => /usr/lib/x86_64-linux-gnu/libQt5Widgets.so.5 (0x00007f87343ec000) libQt5Gui.so.5 => /usr/lib/x86_64-linux-gnu/libQt5Gui.so.5 (0x00007f8733d9f000) libQt5Core.so.5 => /usr/lib/x86_64-linux-gnu/libQt5Core.so.5 (0x00007f87336f9000) libopencv_ml.so.2.4 => /usr/local/lib/libopencv_ml.so.2.4 (0x00007f8733470000) libopencv_objdetect.so.2.4 => /usr/local/lib/libopencv_objdetect.so.2.4 (0x00007f87331eb000) libopencv_flann.so.2.4 => /usr/local/lib/libopencv_flann.so.2.4 (0x00007f8732f77000) libexpat.so.1 => /lib/x86_64-linux-gnu/libexpat.so.1 (0x00007f8732d4d000) libxcb-dri3.so.0 => /usr/lib/x86_64-linux-gnu/libxcb-dri3.so.0 (0x00007f8732b4a000) libxcb-present.so.0 => /usr/lib/x86_64-linux-gnu/libxcb-present.so.0 (0x00007f8732947000) libxcb-sync.so.1 => /usr/lib/x86_64-linux-gnu/libxcb-sync.so.1 (0x00007f8732741000) libxshmfence.so.1 => /usr/lib/x86_64-linux-gnu/libxshmfence.so.1 (0x00007f873253f000) libglapi.so.0 => /usr/lib/x86_64-linux-gnu/libglapi.so.0 (0x00007f8732311000) libXdamage.so.1 => /usr/lib/x86_64-linux-gnu/libXdamage.so.1 (0x00007f873210e000) libXfixes.so.3 => /usr/lib/x86_64-linux-gnu/libXfixes.so.3 (0x00007f8731f08000) libX11-xcb.so.1 => /usr/lib/x86_64-linux-gnu/libX11-xcb.so.1 (0x00007f8731d06000) libxcb-glx.so.0 => /usr/lib/x86_64-linux-gnu/libxcb-glx.so.0 (0x00007f8731aef000) libxcb-dri2.so.0 => /usr/lib/x86_64-linux-gnu/libxcb-dri2.so.0 (0x00007f87318ea000) libxcb.so.1 => /usr/lib/x86_64-linux-gnu/libxcb.so.1 (0x00007f87316cb000) libXxf86vm.so.1 => /usr/lib/x86_64-linux-gnu/libXxf86vm.so.1 (0x00007f87314c5000) libdrm.so.2 => /usr/lib/x86_64-linux-gnu/libdrm.so.2 (0x00007f87312b7000) libboost_iostreams.so.1.54.0 => /usr/lib/x86_64-linux-gnu/libboost_iostreams.so.1.54.0 (0x00007f873109e000) libboost_chrono.so.1.54.0 => /usr/lib/x86_64-linux-gnu/libboost_chrono.so.1.54.0 (0x00007f8730e97000) libpcl_io_ply.so.1.7 => /usr/lib/libpcl_io_ply.so.1.7 (0x00007f8730c48000) libvtkFiltering.so.5.8 => /usr/lib/libvtkFiltering.so.5.8 (0x00007f87306bf000) libvtkImaging.so.5.8 => /usr/lib/libvtkImaging.so.5.8 (0x00007f87300d2000) libvtkIO.so.5.8 => /usr/lib/libvtkIO.so.5.8 (0x00007f872f951000) libusb-1.0.so.0 => /lib/x86_64-linux-gnu/libusb-1.0.so.0 (0x00007f872f73a000) libOpenNI.so.0 => /usr/lib/libOpenNI.so.0 (0x00007f872f4c2000) libvtkGraphics.so.5.8 => /usr/lib/libvtkGraphics.so.5.8 (0x00007f872eb06000) libqhull.so.6 => /usr/lib/x86_64-linux-gnu/libqhull.so.6 (0x00007f872e8b0000) libraw1394.so.11 => /usr/lib/x86_64-linux-gnu/libraw1394.so.11 (0x00007f872e6a2000) libvtksys.so.5.8 => /usr/lib/libvtksys.so.5.8 (0x00007f872e466000) libXau.so.6 => /usr/lib/x86_64-linux-gnu/libXau.so.6 (0x00007f872e262000) libffi.so.6 => /usr/lib/x86_64-linux-gnu/libffi.so.6 (0x00007f872e05a000) libcurl.so.4 => /usr/lib/x86_64-linux-gnu/libcurl.so.4 (0x00007f872ddf3000) libXmu.so.6 => /usr/lib/x86_64-linux-gnu/libXmu.so.6 (0x00007f872dbda000) libXpm.so.4 => /usr/lib/x86_64-linux-gnu/libXpm.so.4 (0x00007f872d9c8000) libopenjpeg.so.2 => /usr/lib/x86_64-linux-gnu/libopenjpeg.so.2 (0x00007f872d7a6000) libIex.so.6 => /usr/lib/x86_64-linux-gnu/libIex.so.6 (0x00007f872d588000) libraw.so.9 => /usr/lib/x86_64-linux-gnu/libraw.so.9 (0x00007f872d2ef000) librosconsole_bridge.so => /opt/ros/indigo/lib/librosconsole_bridge.so (0x00007f872d0eb000) liburdfdom_model.so.0.2 => /usr/lib/x86_64-linux-gnu/liburdfdom_model.so.0.2 (0x00007f872cebe000) libcrypt.so.1 => /lib/x86_64-linux-gnu/libcrypt.so.1 (0x00007f872cc85000) libicudata.so.52 => /usr/lib/x86_64-linux-gnu/libicudata.so.52 (0x00007f872b418000) libutil.so.1 => /lib/x86_64-linux-gnu/libutil.so.1 (0x00007f872b215000) liblzma.so.5 => /lib/x86_64-linux-gnu/liblzma.so.5 (0x00007f872aff3000) libjbig.so.0 => /usr/lib/x86_64-linux-gnu/libjbig.so.0 (0x00007f872ade5000) libIlmThread.so.6 => /usr/lib/x86_64-linux-gnu/libIlmThread.so.6 (0x00007f872abdf000) libgmodule-2.0.so.0 => /usr/lib/x86_64-linux-gnu/libgmodule-2.0.so.0 (0x00007f872a9db000) libxml2.so.2 => /usr/lib/x86_64-linux-gnu/libxml2.so.2 (0x00007f872a674000) libgstbase-0.10.so.0 => /usr/lib/x86_64-linux-gnu/libgstbase-0.10.so.0 (0x00007f872a420000) liborc-0.4.so.0 => /usr/lib/x86_64-linux-gnu/liborc-0.4.so.0 (0x00007f872a19e000) libv4l2.so.0 => /usr/lib/x86_64-linux-gnu/libv4l2.so.0 (0x00007f8729f90000) libxvidcore.so.4 => /usr/lib/x86_64-linux-gnu/libxvidcore.so.4 (0x00007f8729c52000) libx264.so.142 => /usr/lib/x86_64-linux-gnu/libx264.so.142 (0x00007f87298bc000) libvpx.so.1 => /usr/lib/x86_64-linux-gnu/libvpx.so.1 (0x00007f87294dd000) libvorbisenc.so.2 => /usr/lib/x86_64-linux-gnu/libvorbisenc.so.2 (0x00007f872900e000) libvorbis.so.0 => /usr/lib/x86_64-linux-gnu/libvorbis.so.0 (0x00007f8728de1000) libtheoraenc.so.1 => /usr/lib/x86_64-linux-gnu/libtheoraenc.so.1 (0x00007f8728ba1000) libtheoradec.so.1 => /usr/lib/x86_64-linux-gnu/libtheoradec.so.1 (0x00007f8728988000) libspeex.so.1 => /usr/lib/x86_64-linux-gnu/libspeex.so.1 (0x00007f872876f000) libschroedinger-1.0.so.0 => /usr/lib/x86_64-linux-gnu/libschroedinger-1.0.so.0 (0x00007f87284ab000) libopus.so.0 => /usr/lib/x86_64-linux-gnu/libopus.so.0 (0x00007f8728263000) libmp3lame.so.0 => /usr/lib/x86_64-linux-gnu/libmp3lame.so.0 (0x00007f8727fd6000) libgsm.so.1 => /usr/lib/x86_64-linux-gnu/libgsm.so.1 (0x00007f8727dc8000) libva.so.1 => /usr/lib/x86_64-linux-gnu/libva.so.1 (0x00007f8727bb2000) librtmp.so.0 => /usr/lib/x86_64-linux-gnu/librtmp.so.0 (0x00007f8727998000) libgnutls.so.26 => /usr/lib/x86_64-linux-gnu/libgnutls.so.26 (0x00007f87276d9000) libbz2.so.1.0 => /lib/x86_64-linux-gnu/libbz2.so.1.0 (0x00007f87274c9000) libharfbuzz.so.0 => /usr/lib/x86_64-linux-gnu/libharfbuzz.so.0 (0x00007f8727274000) libXdmcp.so.6 => /usr/lib/x86_64-linux-gnu/libXdmcp.so.6 (0x00007f872706e000) libpq.so.5 => /usr/lib/libpq.so.5 (0x00007f8726e3f000) libmysqlclient.so.18 => /usr/lib/x86_64-linux-gnu/libmysqlclient.so.18 (0x00007f8726906000) libvtkDICOMParser.so.5.8 => /usr/lib/libvtkDICOMParser.so.5.8 (0x00007f87266ed000) libnetcdf.so.7 => /usr/lib/libnetcdf.so.7 (0x00007f87263b0000) libnetcdf_c++.so.4 => /usr/lib/libnetcdf_c++.so.4 (0x00007f8726193000) libvtkmetaio.so.5.8 => /usr/lib/libvtkmetaio.so.5.8 (0x00007f8725f06000) libsqlite3.so.0 => /usr/lib/x86_64-linux-gnu/libsqlite3.so.0 (0x00007f8725c4d000) libudev.so.1 => /lib/x86_64-linux-gnu/libudev.so.1 (0x00007f8725a3c000) libvtkverdict.so.5.8 => /usr/lib/libvtkverdict.so.5.8 (0x00007f8725806000) libidn.so.11 => /usr/lib/x86_64-linux-gnu/libidn.so.11 (0x00007f87255d3000) libssl.so.1.0.0 => /lib/x86_64-linux-gnu/libssl.so.1.0.0 (0x00007f8725374000) libcrypto.so.1.0.0 => /lib/x86_64-linux-gnu/libcrypto.so.1.0.0 (0x00007f8724f98000) libgssapi_krb5.so.2 => /usr/lib/x86_64-linux-gnu/libgssapi_krb5.so.2 (0x00007f8724d51000) liblber-2.4.so.2 => /usr/lib/x86_64-linux-gnu/liblber-2.4.so.2 (0x00007f8724b42000) libldap_r-2.4.so.2 => /usr/lib/x86_64-linux-gnu/libldap_r-2.4.so.2 (0x00007f87248f1000) liblcms2.so.2 => /usr/lib/x86_64-linux-gnu/liblcms2.so.2 (0x00007f872469c000) libv4lconvert.so.0 => /usr/lib/x86_64-linux-gnu/libv4lconvert.so.0 (0x00007f8724423000) libogg.so.0 => /usr/lib/x86_64-linux-gnu/libogg.so.0 (0x00007f872421a000) libgcrypt.so.11 => /lib/x86_64-linux-gnu/libgcrypt.so.11 (0x00007f8723f9a000) libtasn1.so.6 => /usr/lib/x86_64-linux-gnu/libtasn1.so.6 (0x00007f8723d86000) libp11-kit.so.0 => /usr/lib/x86_64-linux-gnu/libp11-kit.so.0 (0x00007f8723b44000) libgraphite2.so.3 => /usr/lib/x86_64-linux-gnu/libgraphite2.so.3 (0x00007f872391d000) libkrb5.so.3 => /usr/lib/x86_64-linux-gnu/libkrb5.so.3 (0x00007f8723652000) libcom_err.so.2 => /lib/x86_64-linux-gnu/libcom_err.so.2 (0x00007f872344e000) libhdf5_hl.so.7 => /usr/lib/x86_64-linux-gnu/libhdf5_hl.so.7 (0x00007f872321e000) libhdf5.so.7 => /usr/lib/x86_64-linux-gnu/libhdf5.so.7 (0x00007f8722d82000) libcurl-gnutls.so.4 => /usr/lib/x86_64-linux-gnu/libcurl-gnutls.so.4 (0x00007f8722b20000) libcgmanager.so.0 => /lib/x86_64-linux-gnu/libcgmanager.so.0 (0x00007f8722905000) libnih.so.1 => /lib/x86_64-linux-gnu/libnih.so.1 (0x00007f87226ed000) libnih-dbus.so.1 => /lib/x86_64-linux-gnu/libnih-dbus.so.1 (0x00007f87224e3000) libdbus-1.so.3 => /lib/x86_64-linux-gnu/libdbus-1.so.3 (0x00007f872229e000) libk5crypto.so.3 => /usr/lib/x86_64-linux-gnu/libk5crypto.so.3 (0x00007f872206f000) libkrb5support.so.0 => /usr/lib/x86_64-linux-gnu/libkrb5support.so.0 (0x00007f8721e64000) libresolv.so.2 => /lib/x86_64-linux-gnu/libresolv.so.2 (0x00007f8721c49000) libsasl2.so.2 => /usr/lib/x86_64-linux-gnu/libsasl2.so.2 (0x00007f8721a2e000) libgssapi.so.3 => /usr/lib/x86_64-linux-gnu/libgssapi.so.3 (0x00007f87217f0000) libgpg-error.so.0 => /lib/x86_64-linux-gnu/libgpg-error.so.0 (0x00007f87215eb000) libkeyutils.so.1 => /lib/x86_64-linux-gnu/libkeyutils.so.1 (0x00007f87213e7000) libheimntlm.so.0 => /usr/lib/x86_64-linux-gnu/libheimntlm.so.0 (0x00007f87211de000) libkrb5.so.26 => /usr/lib/x86_64-linux-gnu/libkrb5.so.26 (0x00007f8720f56000) libasn1.so.8 => /usr/lib/x86_64-linux-gnu/libasn1.so.8 (0x00007f8720cb5000) libhcrypto.so.4 => /usr/lib/x86_64-linux-gnu/libhcrypto.so.4 (0x00007f8720a82000) libroken.so.18 => /usr/lib/x86_64-linux-gnu/libroken.so.18 (0x00007f872086d000) libwind.so.0 => /usr/lib/x86_64-linux-gnu/libwind.so.0 (0x00007f8720644000) libheimbase.so.1 => /usr/lib/x86_64-linux-gnu/libheimbase.so.1 (0x00007f8720436000) libhx509.so.5 => /usr/lib/x86_64-linux-gnu/libhx509.so.5 (0x00007f87201ed000) |
|
|
This post was updated on .
i have started a new topic here because the questions are not deviating from this topic.
|
|
Administrator
|
The only thing I see is that you are using a local version of opencv, while rtabmap_ros is linking on cv_bridge installed by indigo, which links on opencv installed with indigo. For gdb, it more the backtrace information that is useful. When launching rtabmap like this: $ roslaunch rtabmap_ros rtabmap.launch launch_prefix:="xterm -e gdb --args"Type "run" in each terminal like this: 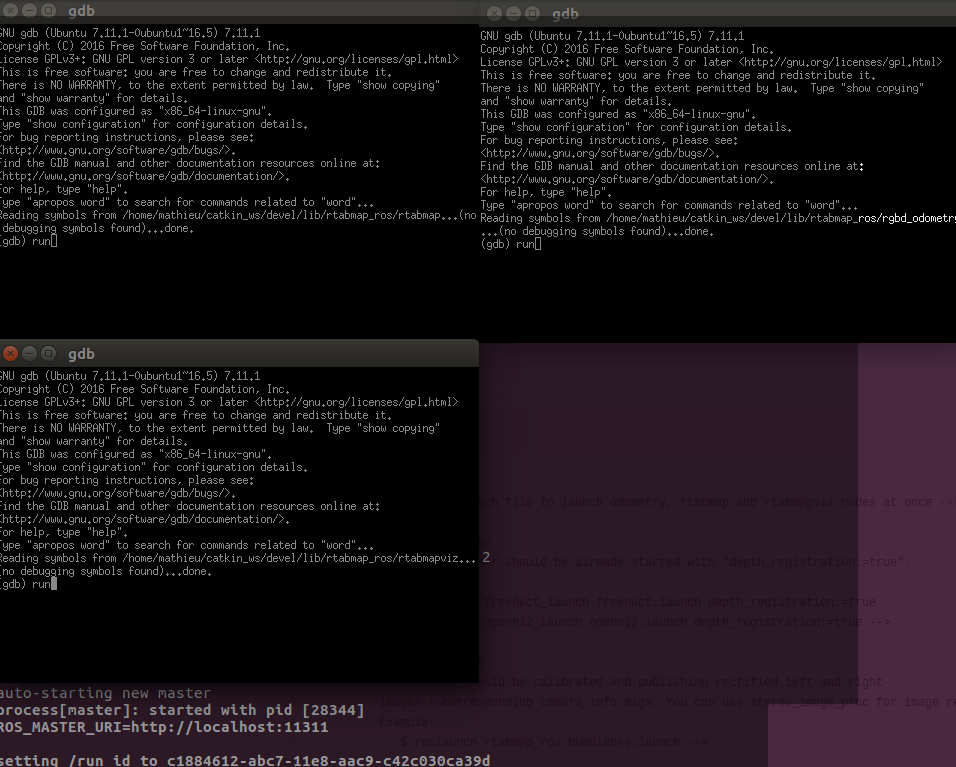 Type "bt" when it crashes, copy/paste the log here. |
|
|
We tried the whole process and it worked on kinetic version of ubuntu 16.04, it gaved lots of error on ubuntu 14.04. but with this it was much easier and atlast its working fine on rviz as well. no odometry issue. can u please update the github file so that its not confusing. no core dumped issue and no Odometry issue.
|
|
Administrator
|
Which is exactly the problematic step for Indigo on this page?
I followed the steps from a fresh ros indigo using docker: $ docker pull ros:indigo-perception $ docker run -it ros:indigo-perception # cd # apt-get update # sudo apt-get install ros-indigo-rtabmap ros-indigo-rtabmap-ros # sudo apt-get remove ros-indigo-rtabmap ros-indigo-rtabmap-ros # git clone https://github.com/introlab/rtabmap.git rtabmap # cd rtabmap/build # cmake .. # make install // The following would be already done if you setup the ros workspace # mkdir catkin_ws # cd catkin_ws # mkdir src # cd src # catkin_init_workspace # cd ~/catkin_ws # git clone https://github.com/introlab/rtabmap_ros.git src/rtabmap_ros # catkin_make // test without ui (cannot run gui app out-of-the-box using docker) # roslaunch rtabmap_ros rtabmap.launch rtabmapviz:=false // no errors... Also tried launching freenect_launch with rviz on client computer (not in docker) to feed RGB-D images to rtabmap_ros running in docker and to visualize, and it worked fine. Second installation approach with custom opencv installation (step 1), from the docker state above: # cd # git clone https://github.com/opencv/opencv.git # cd opencv # git checkout 2.4.11 # mkdir build # cd build # cmake -DBUILD_TESTS=OFF -DBUILD_PERF_TESTS=OFF -DBUILD_EXAMPLES=OFF .. # make # make install // rebuild rtabmap and rtabmap_ros, make sure to clean build directories to reset cmake cache # rm -rf ~/rtabmap/build/* # rm -rf ~/catkin_ws/build/* # cd ~/rtabmap/build # cmake .. # make # make install # cd ~/catkin_ws # catkin_make // test # roslaunch rtabmap_ros rtabmap.launch rtabmapviz:=false Still no problems launching rtabmap nodes... |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |