Hi,
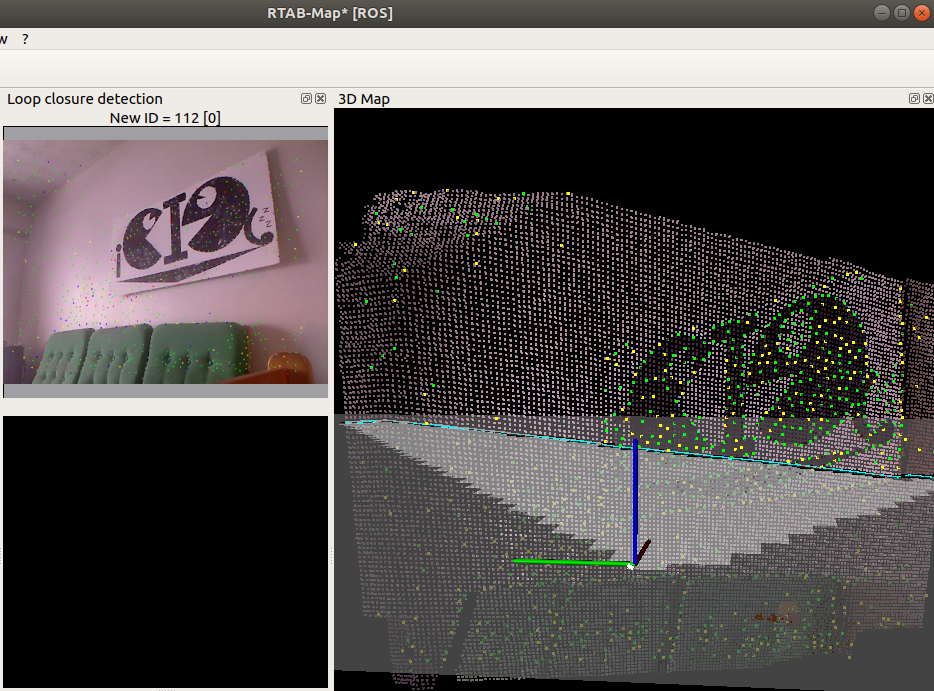
If rtabmapviz is launched, you could see the generated scan like this (line in cyan or gray in the middle, I overlayed the occupancy grid created from this scan):
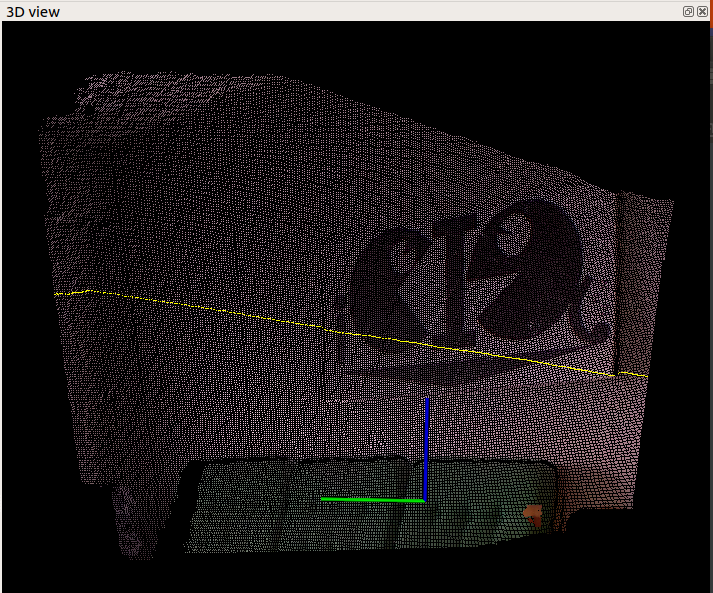
You can also open the resulting database in rtabmap-databaseViewer, then open 3D View and the scan should appear in yellow:
In RVIZ, with rtabmap_ros/MapCloud plugin, check Cloud from Scan, and a red line showing the scan should appear:
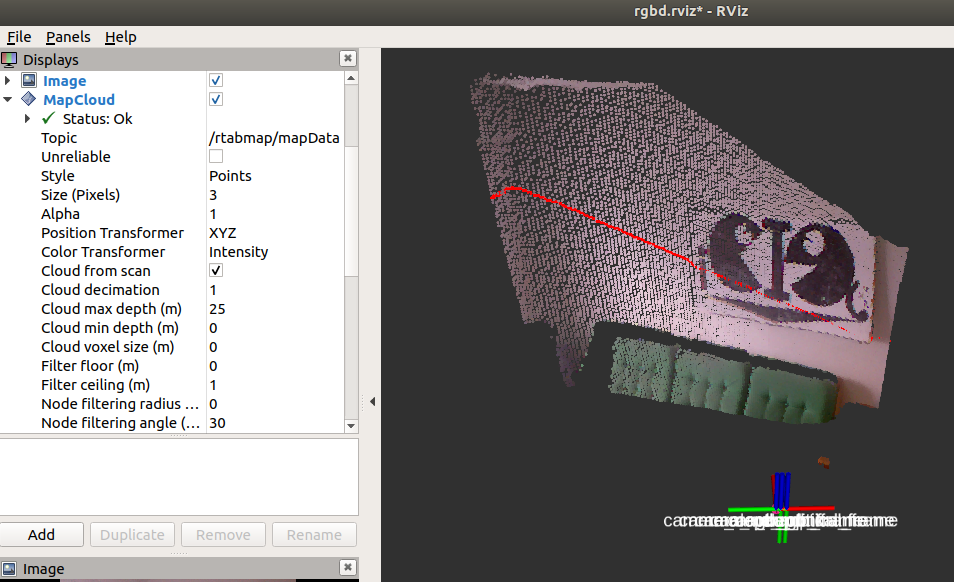
If the line doesn't show up, you may check if a scan is actually generated by adding "ROS_WARN("scan = %d", scan.size());" just after this
line.
cheers,
Mathieu

