Hi,
For RGBD-SLAM datasets, I just tried the example at top of
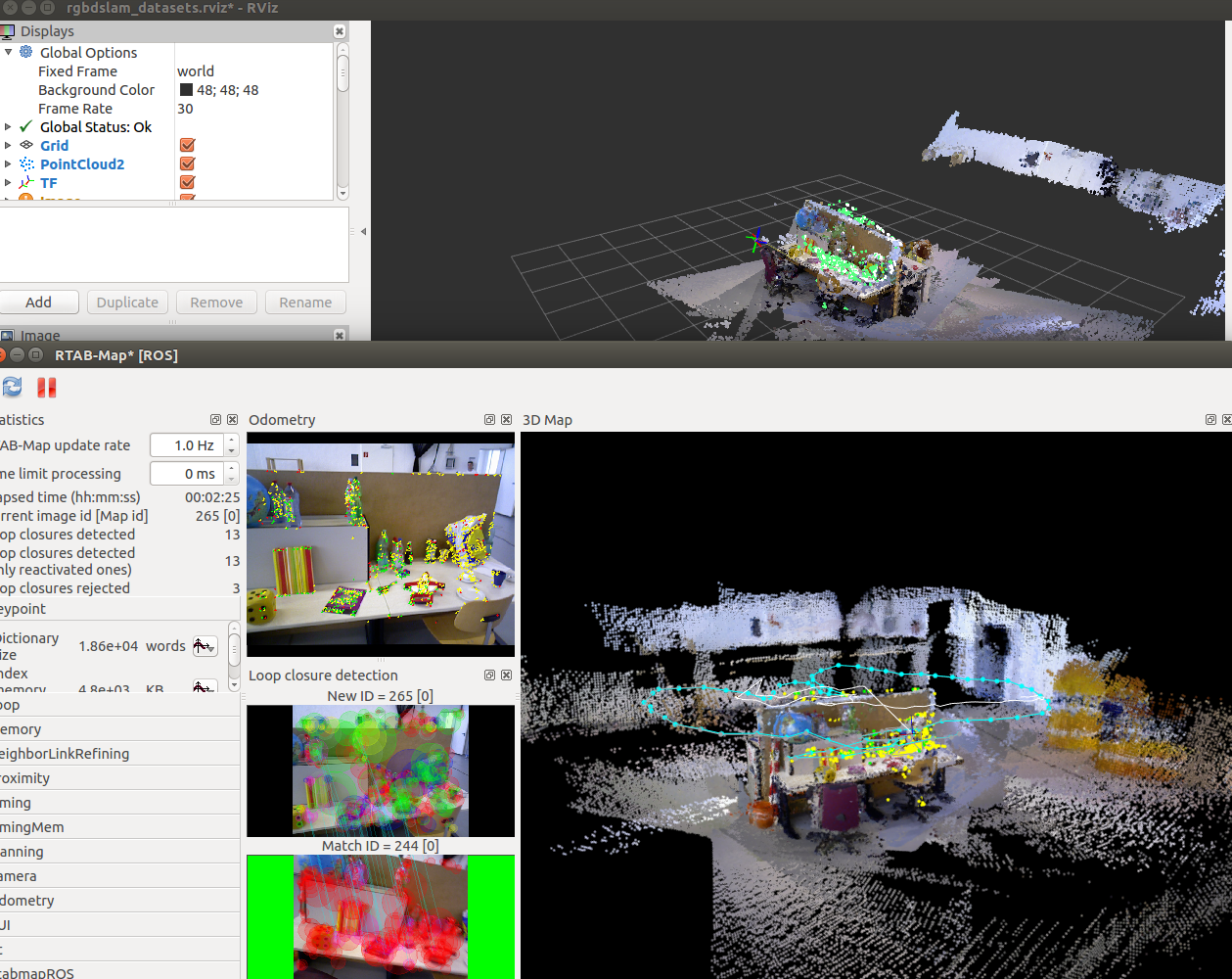
rgbdslam_datasets.launch and it should work (I launched with rtabmapviz:=true to see rtabmapviz along with rviz):
$ wget http://vision.in.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_long_office_household.bag
$ rosbag decompress rgbd_dataset_freiburg3_long_office_household.bag
$ roslaunch rtabmap_ros rgbdslam_datasets.launch rtabmapviz:=true
$ rosbag play --clock rgbd_dataset_freiburg3_long_office_household.bag
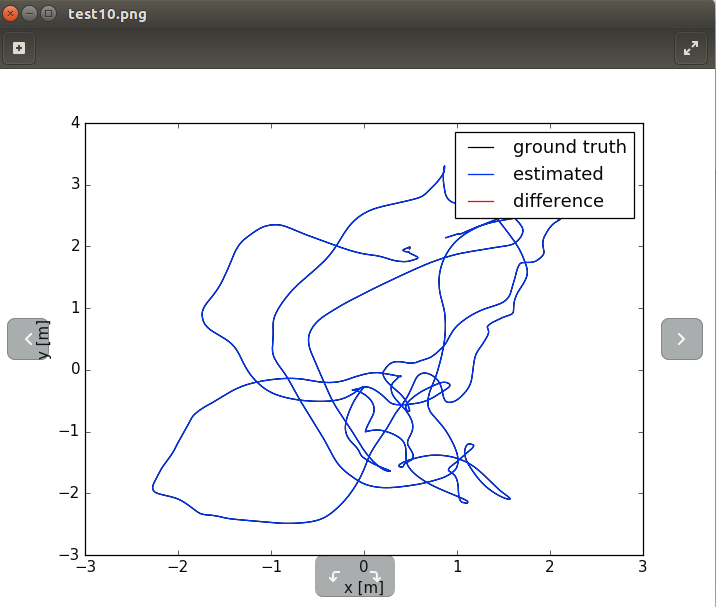
RMSE (View->Statistics->GT->Translational rmse) should be around 0.5 cm.
For EUROC datasets, I didn't test the rosbags, just the extracted images directory. For benchmarking, I recommend to use the offline tools of rtabmap: rtabmap-rgbd_dataset, rtabmap-euroc_dataset and rtabmap-kitti_dataset.
I just created an example launch file to run euroc bags, see
euroc_datasets.launch. Example:
$ roslaunch rtabmap_ros euroc_datasets.launch
$ rosbag play --clock MH_01_easy.bag
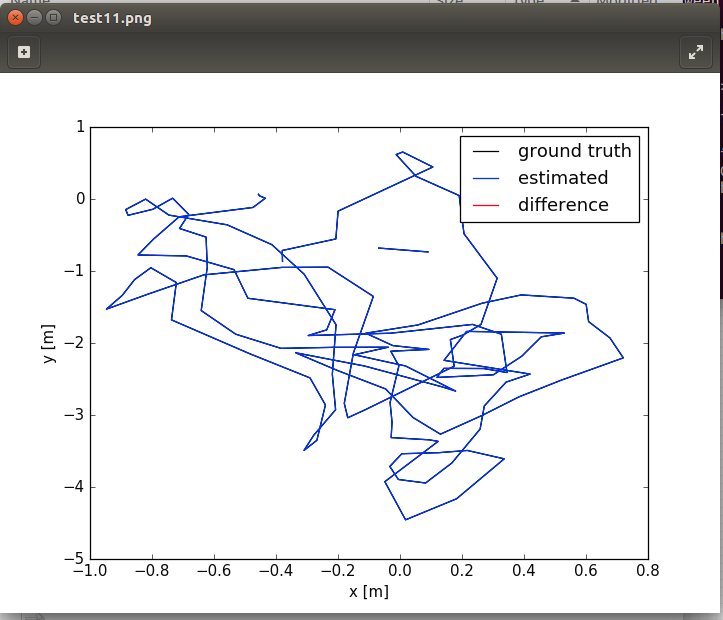
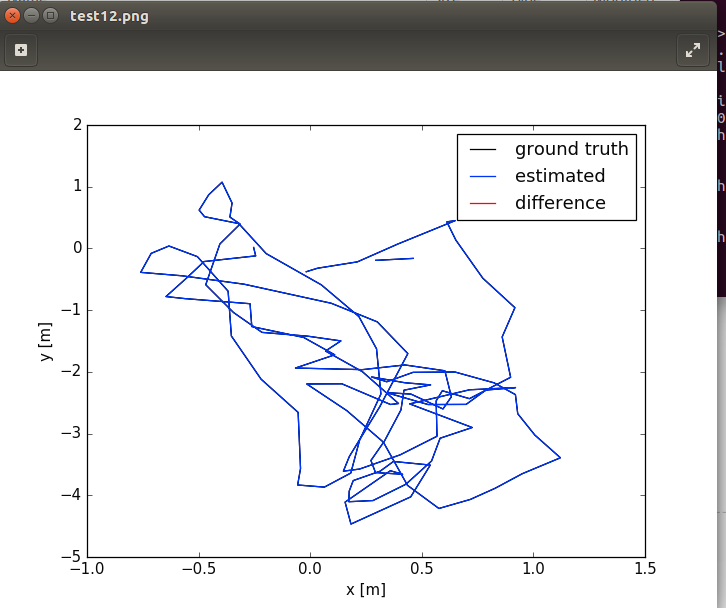
RMSE (View->Statistics->GT->Translational rmse) should be around 11-12 cm.
cheers,
Mathieu