Hello,
I'm using ROS Indigo, rtabmap 0.11.8 binaries and Ubuntu 14.04.
I collected some bag data for a short teleoperated run of my Kobuki robot in my living room and I wanted to compare the 2D map created on the grid_map versus proj_map topic. The robot has a Hokoyu laser scanner about 0.1m off the ground and an Xtion Pro depth camera about 0.45m off the ground.
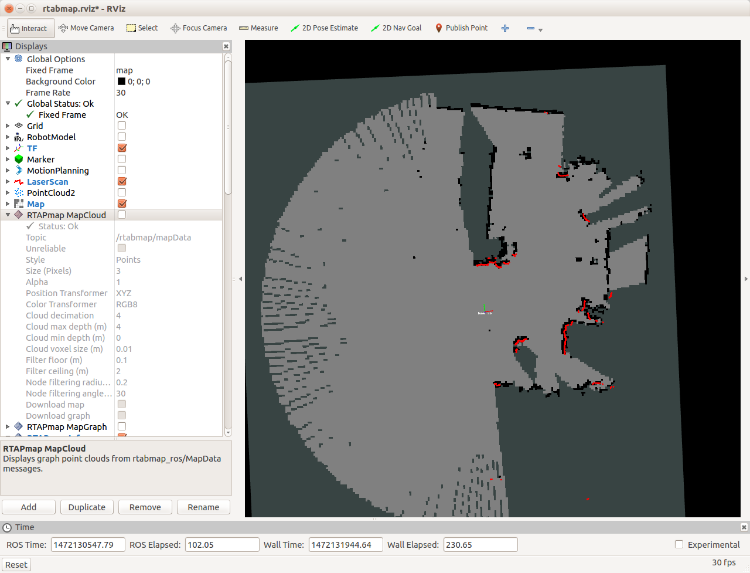
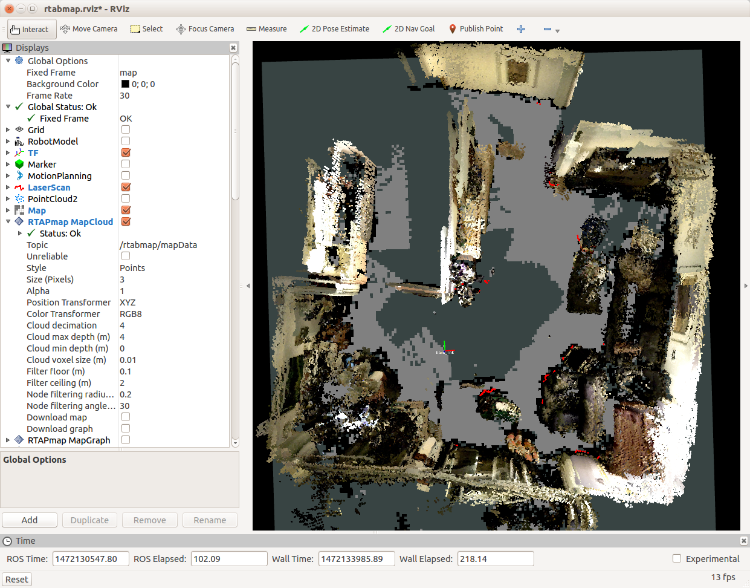
The following images show the result of running the demo_robot_mapping.launch file against my bag data under two scenarios. In the first, I remap grid_map to /map and in the second I remap proj_map to /map. The first image in each pair includes the map cloud so you can see the objects in the room.
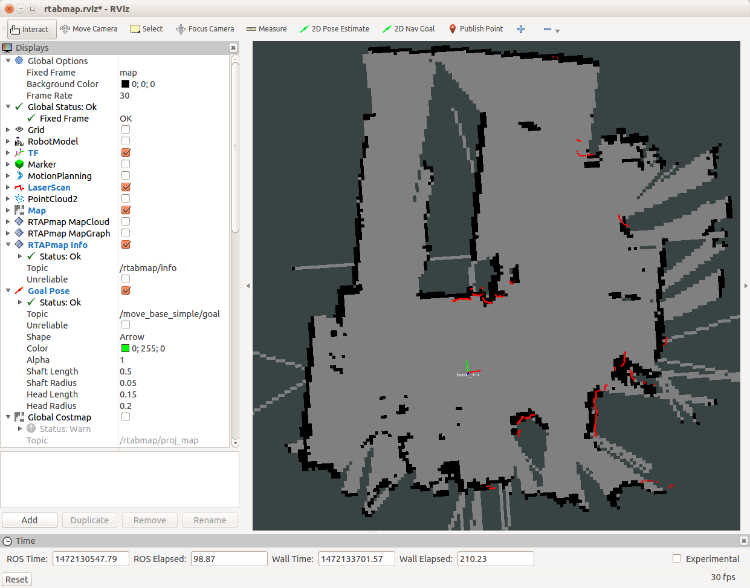
grid_map:
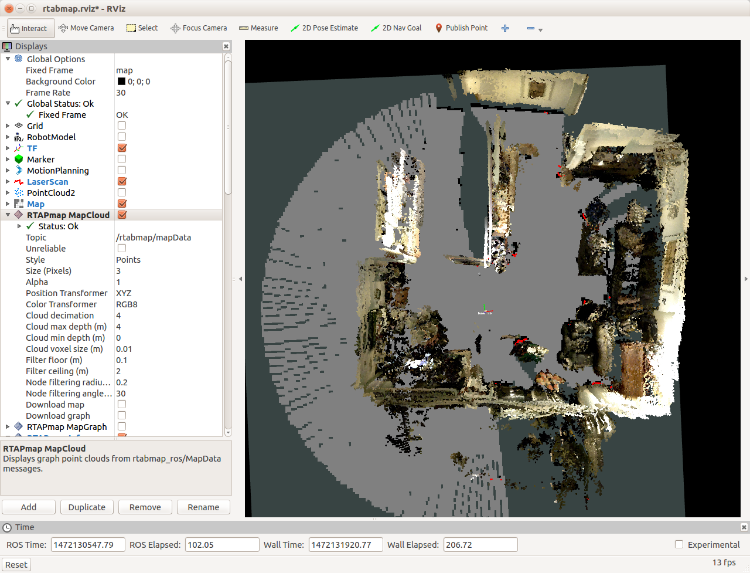
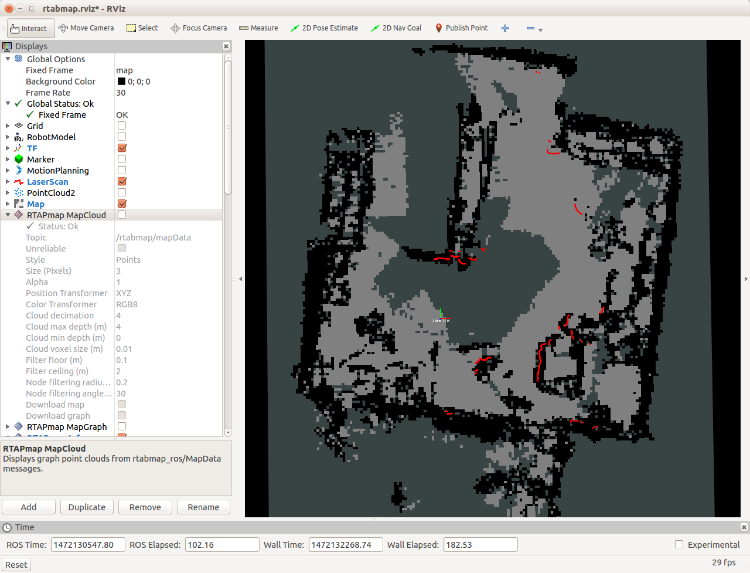
proj_map:
As a final comparison, here is the result when using gmapping:
I'm trying to understand a couple of things about these images:
1. For the grid_map images, why do I see the large arc of free grid cells in the map? This arc actually moves around with the robot during the mapping process but it does not show up when running gmapping.
2. For the proj_map images, why is the group of cells in the middle of the image not marked as free (white)? The depth image from the camera should not be projecting anything to the ground so I would have thought these cells should be white. Or is it because the depth data is out of range of the camera?
Thanks!
patrick

