how to fix the movement of lidar output when the vehicle starts turning?


|
Hi Mattieu,
happy new year! actually i want to do navigation based on gps, so i used rtabmap (including 3d lidar, imu , wheel odometer and rtk gps) as map provider (tf related to the publishing of map is deactivated), and I used 2 instances of robot-localization pkg for publishing odom->base-link and map->odom . I have also merged rtabmap/odom and rtabmap/localization_pose in ekf-se-map(global odometry), but i can see that in rviz, when the vehicle moves forward the pointcloud is aligned with the 2d map, but as the vehicle turns, the pointcloud also turns: 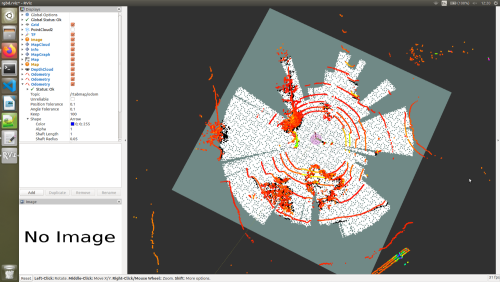 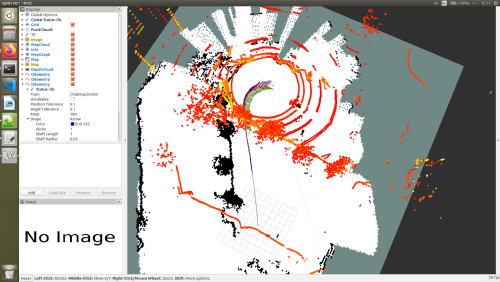 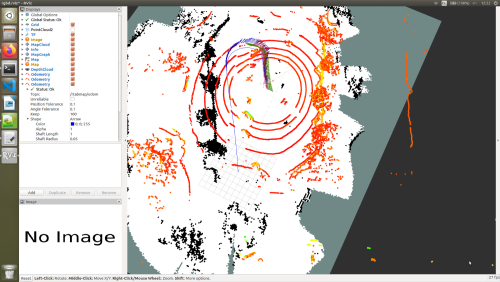 what is the issue? in the following you can see me parameter setting: ekf_se_map: frequency: 30 sensor_timeout: 0.1 two_d_mode: true transform_time_offset: 0.0 transform_timeout: 0.0 print_diagnostics: true debug: false map_frame: map odom_frame: icp_odom base_link_frame: base_link world_frame: map # ------------------------------------- # Wheel odometry: odom0: /warthog_velocity_controller/odom odom0_config: [false, false, false, false, false, false, true, true, false, false, false, true, false, false, false] odom0_queue_size: 10 odom0_nodelay: true odom0_differential: false odom0_relative: false # ------------------------------------- # GPS odometry: odom1: /outdoor_waypoint_nav/odometry/gps odom1_config: [true, true, false, false, false, false, false, false, false, false, false, false, false, false, false] odom1_queue_size: 10 odom1_nodelay: true odom1_differential: false odom1_relative: false # ------------------------------------- # Lidar odometry: # velocity from odometry odom2: /rtabmap/odom odom2_config: [false, false, false, false, false, false, true, true, false, false, false, true, false, false, false] odom2_queue_size: 10 odom2_nodelay: true odom2_differential: true #always true odom2_relative: false #.................................................. #Localization_Pose pose0: /rtabmap/localization_pose pose0_config: [true, true, false, false, false, true, false, false, false, false, false, false, false, false, false] pose0_queue_size: 10 pose0_differential: false pose0_relative: false # -------------------------------------- # imu configure: imu0: /gx5/imu/data imu0_config: [false, false, false, false, false, true, false, false, false, true, true, false, true, true, false] imu0_nodelay: true imu0_differential: false imu0_relative: false imu0_queue_size: 10 imu0_remove_gravitational_acceleration: true use_control: false process_noise_covariance: [1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1e-3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3] initial_estimate_covariance: [1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0] |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |