hello,
I am using a handheld scanner Kinect V2 for room interior scanning.
I have searched the previous question about" Fix ground plane to X-Y plane"& "rtabmap don't recognize the ground~~ ".
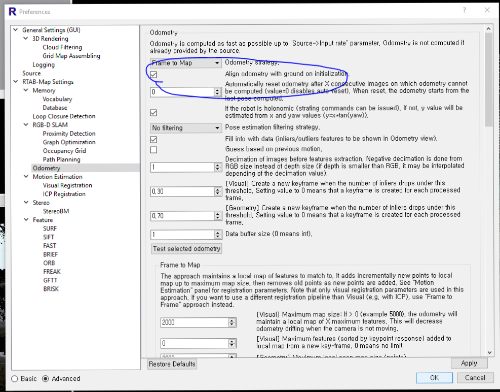
I activate "Align odometry with ground on initialization" option in Odometry panel, and also force 3DoF(x,y theta) in graph optimization panel.
But I found that the plane can not be kept fixing into X-Y plane, which plays a role in my process.
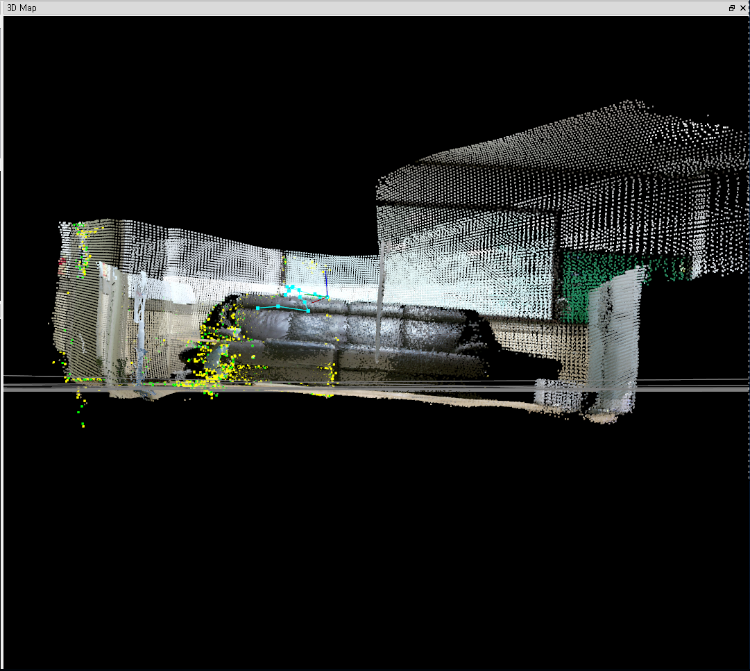
As you can see, left side of ground is fixed, but right side of ground is tilted.

