Hi,
1. Yes, by using Marker/Priors. See also
this post.
$ rtabmap --params | grep Marker/Priors
Param: Marker/Priors = "" [World prior locations of the markers. The map will be transformed in marker's
world frame when a tag is detected. Format is the marker's ID followed by its
position (angles in rad), markers are separated by vertical line
("id1 x y z roll pitch yaw|id2 x y z roll pitch yaw").
Example: "1 0 0 1 0 0 0|2 1 0 1 0 0 1.57" (marker 2 is 1 meter
forward than marker 1 with 90 deg yaw rotation).]
Param: Marker/PriorsVarianceAngular = "0.001" [Angular variance to set on marker priors.]
Param: Marker/PriorsVarianceLinear = "0.001" [Linear variance to set on marker priors.]
2. There is no option in the iOS app to set marker priors. I just created a
feature-request for this. If you are able to rebuild the app, they could be hard-coded around this
section.
3. If you set the view in Third-Person, you should see the frame of the device (like in this
video). For the trajectory, do you mean showing frames for every poses in the trajectory? The frames of the detected apriltags
should show up in the 3D view.
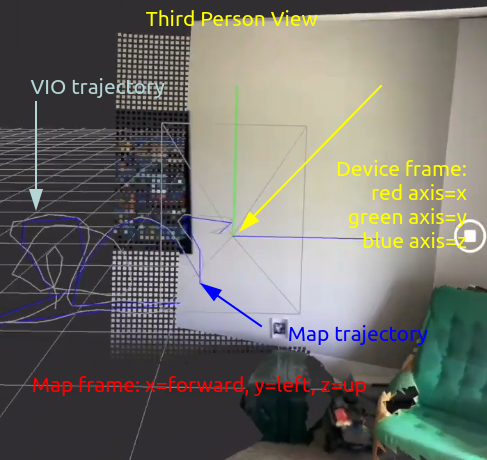
In this screen shot, the iPad is held in Portrait orientation, which is 90 clock-wise degrees rotated.
4. No official manual (only that
video), it is a free open source sandbox app, you would have to ask Google about an option and you would find a post on this forum or on github that would be related. Well, the official documentation would be the list of papers about RTAB-Map at the top of this
page.
cheers,
Mathieu

