I have robot localization and rtabmap running on the same remote robot. In the past, the map frame would show up as soon as rtabmap started running.
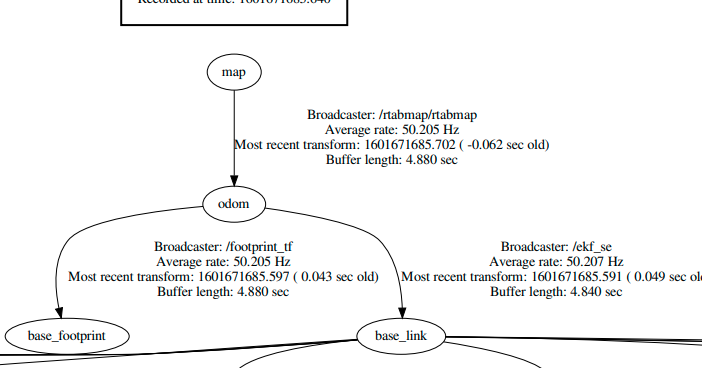
Now, it would take 5min for the map frame to show up. Prior to that, no transform exists. After the transform is published it looks nominal:
The strange thing is I'm not getting any errors from rtabmap. It's not complaining about any of its inputs. I'm also not using odom topic as an input, just the odom frame.
rqt_graph initially shows no connection between ekf_se(the robot localization node) and rtabmap. After the 5min, the two connects. However, the whole time, the odom frame is published.
Is this some weird kind of sync issue?
Another observation is that the RAM usage of rtabmap grows progressively large, till it reaches close to 15GB. This is while map is still not being built yet. I didn't observe this behavior offline.

