Hi
I'vemade some test, but i'm not able to launch your command properly.
I got this message if I enter un preferences panel:
failed to get some RTAB-map parameters from ROS server, the rtabmap node may not started or some parameters won't work...
I've make 2 test,only udebug and only GDB
so...
for udebug, I got this:
[DEBUG] (2019-06-14 11:31:41.032) VWDictionary.cpp:930::addNewWords() total time 0.019120s
[DEBUG] (2019-06-14 11:31:41.032) VWDictionary.cpp:563::clear()
[DEBUG] (2019-06-14 11:31:41.034) VWDictionary.cpp:563::clear()
[DEBUG] (2019-06-14 11:31:41.035) RegistrationVis.cpp:1314::computeTransformationImpl()
[DEBUG] (2019-06-14 11:31:41.035) RegistrationVis.cpp:1327::computeTransformationImpl() words from3D=878 to2D=887
[DEBUG] (2019-06-14 11:31:41.036) util3d_motion_estimation.cpp:98::estimateMotion3DTo2D() words3A=878 words2B=887 matches=41 words3B=887 guess=xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000
[DEBUG] (2019-06-14 11:31:41.041) RegistrationVis.cpp:1353::computeTransformationImpl() inliers: 29/41
[DEBUG] (2019-06-14 11:31:41.041) RegistrationVis.cpp:1462::computeTransformationImpl() Refine with bundle adjustment
[DEBUG] (2019-06-14 11:31:41.041) OptimizerG2O.cpp:1267::optimizeBA() Optimizing graph...
/home/sdeboffle/Bureau/Quanergy_launch/catkin_ws/devel/lib/rtabmap_ros/rtabmap: symbol lookup error: /usr/local/lib/librtabmap_core.so.0.19: undefined symbol: _ZN3g2o30OptimizationAlgorithmLevenbergC1EPNS_6SolverE
[ INFO] [1560504701.068338570]: Odom: ratio=0.746964, std dev=0.037634m|0.037634rad, update time=0.090078s
[ INFO] [1560504701.153869987]: Odom: ratio=0.722449, std dev=0.038325m|0.038325rad, update time=0.080172s
[rtabmap/rtabmap-4] process has died [pid 28324, exit code 127, cmd /home/sdeboffle/Bureau/Quanergy_launch/catkin_ws/devel/lib/rtabmap_ros/rtabmap -d --udebug scan_cloud:=assembled_cloud rgbd_image:=rgbd_image __name:=rtabmap __log:=/home/sdeboffle/.ros/log/12f11700-8e84-11e9-bf3f-9829a6388ce0/rtabmap-rtabmap-4.log].
log file: /home/sdeboffle/.ros/log/12f11700-8e84-11e9-bf3f-9829a6388ce0/rtabmap-rtabmap-4*.log
From GDB, I got this
Capture_du_2019-06-14_11-41-11.pngI'm able to pass through the bug by change the Vis/BundleAdjustment to 0 instead of 1.
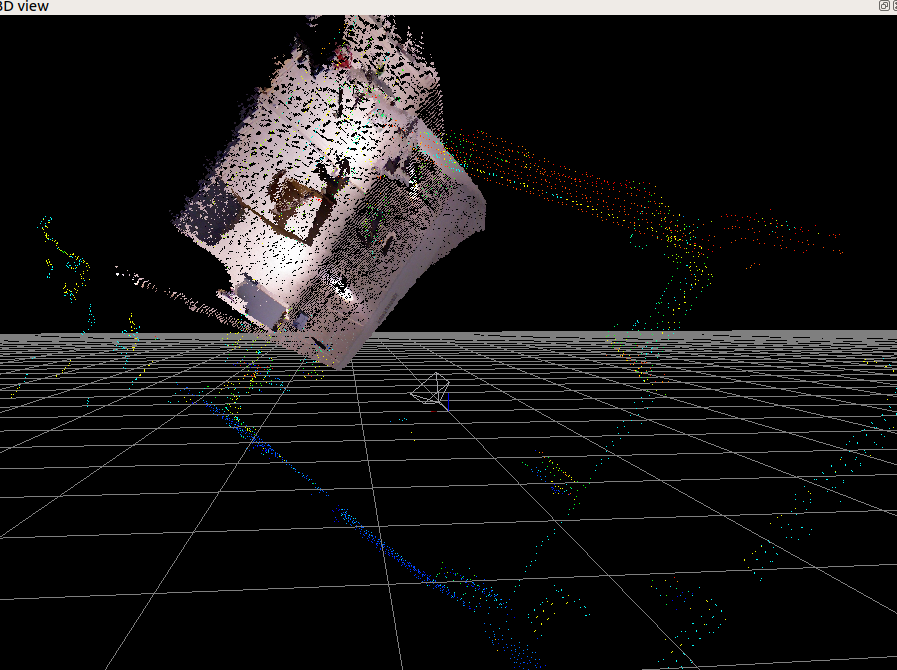
I've some green and yellow screen during scan but no crash. So I can move around, make my scan, and reopen it to find loop closure with the database editor. Don't know if the result can be better in a other way but I can make my test like that and see if the settup is robust.
hope this can help
https://wetransfer.com/downloads/e6e19995214bb9064007d9bcccb6407020190614100347/f455b73f42c4debcdb61d3bde169827a20190614100347/7d61a5https://wetransfer.com/downloads/c34adad9b1acfa61402630e010fad0b320190614152228/f0a80811b70aab4f9d6642b6d450bcc620190614152228/de7cb6cheers
stephane