Hi,
I tried with 0.11.13 (rtabmap kinetic version in
shadow-fixed repository) with a kinect xbox 360 and here some results. Commands used:
$ rosrun freenect_launch freenect.launch depth_registration:=true
$ roslaunch rtabmap_ros rtabmap.launch rviz:=true rtabmapviz:=false rtabmap_args:="--delete_db_on_start --Odom/AlignWithGround true"
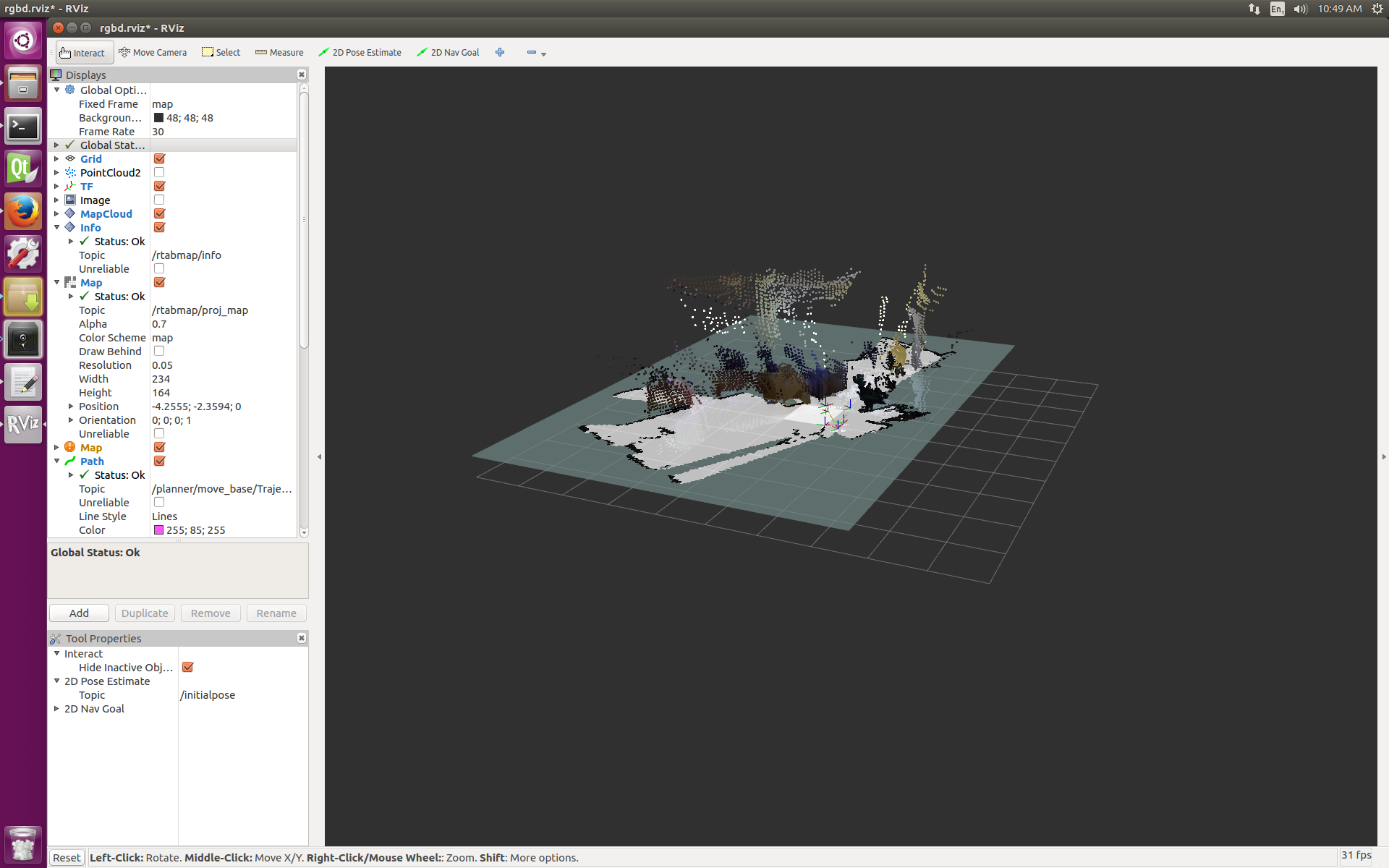
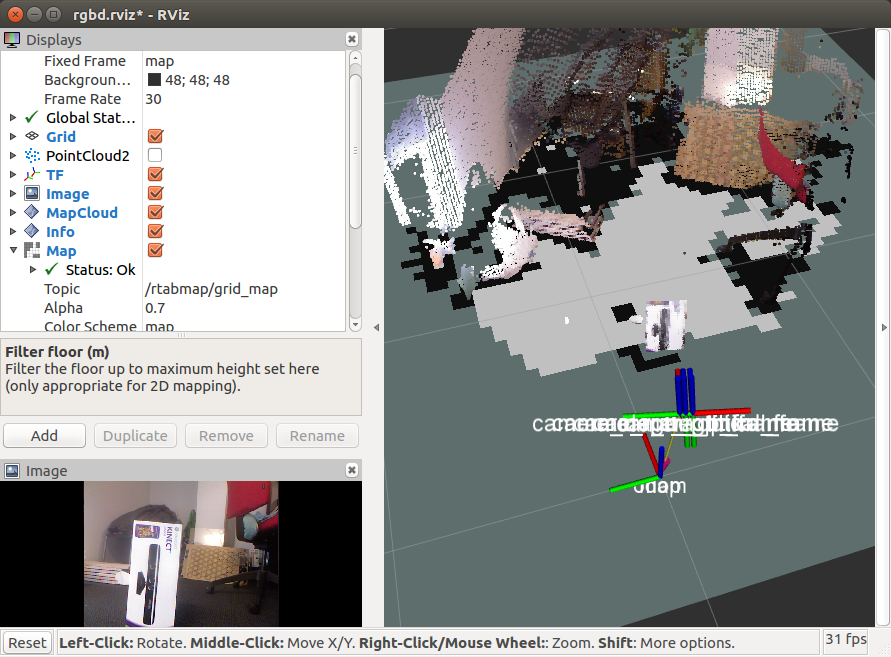
/rtabmap/grid_map with object over ground that the camera can actually see (if the object is not here):
 /rtabmap/grid_map
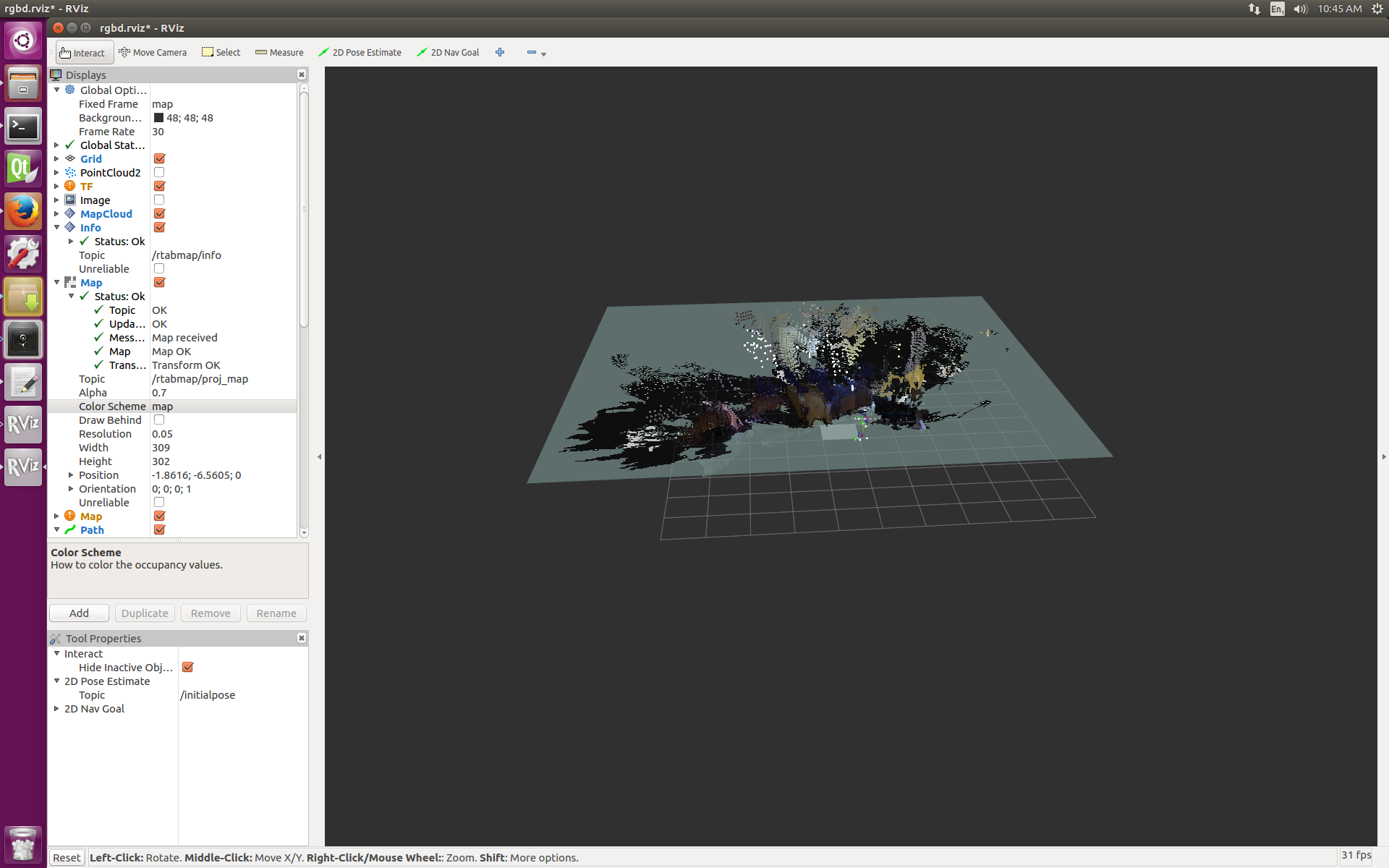
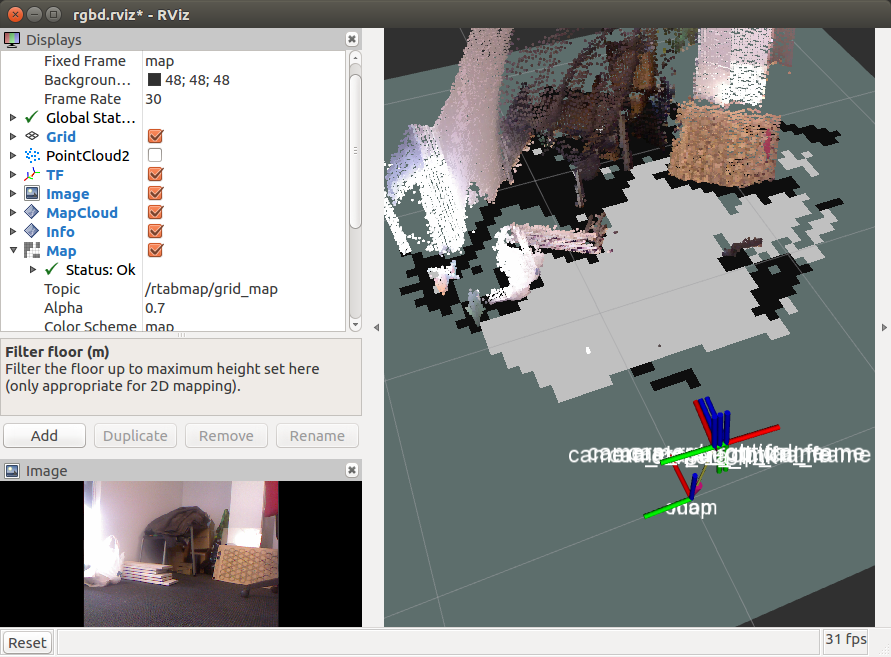
/rtabmap/grid_map without object (cells are cleared):
 /rtabmap/grid_map
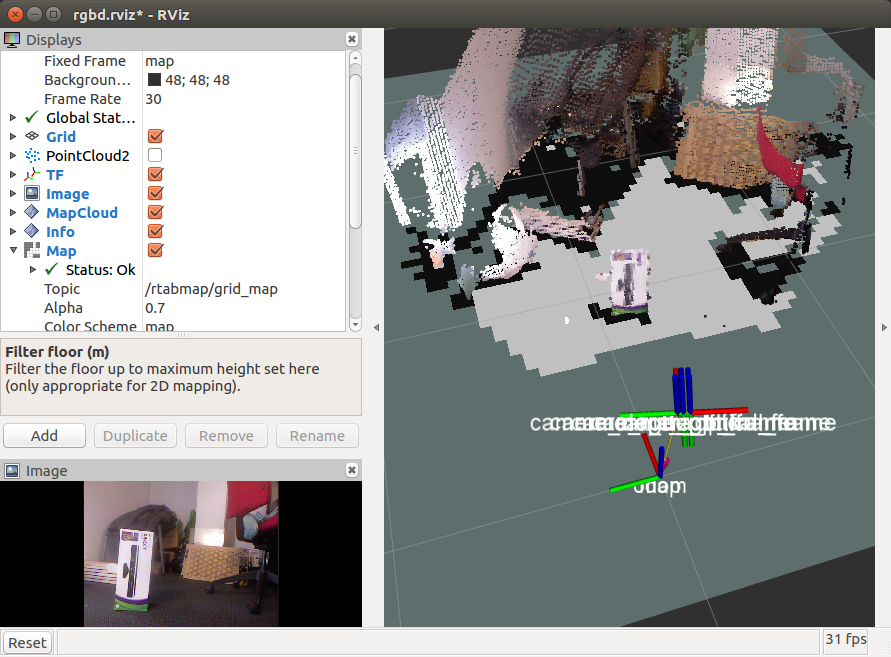
/rtabmap/grid_map with object over ground that the camera
cannot actually see (if the object is not here):
 /rtabmap/grid_map
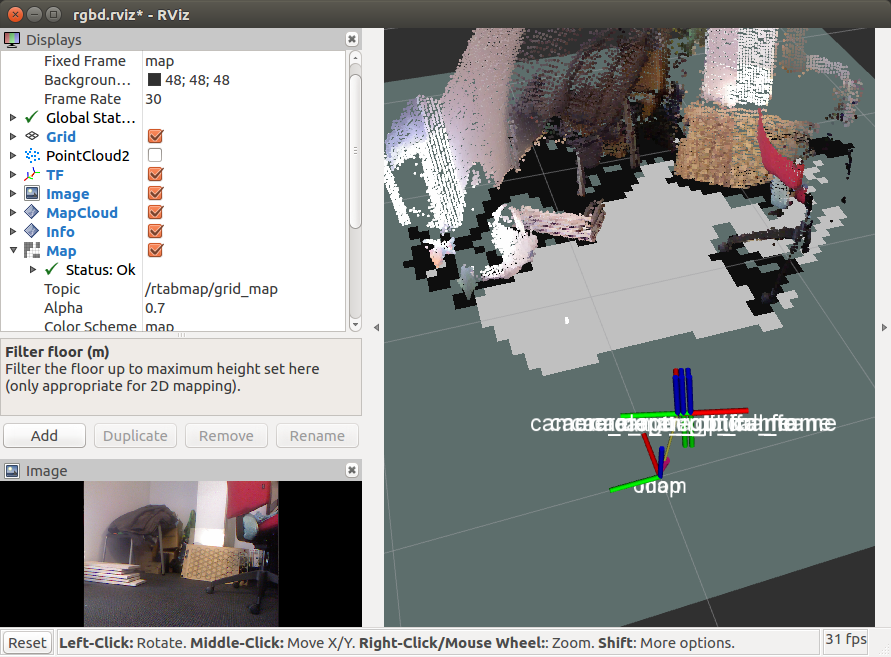
/rtabmap/grid_map without object (cells are not cleared):
Now, same thing but with
/rtabmap/octomap_grid:
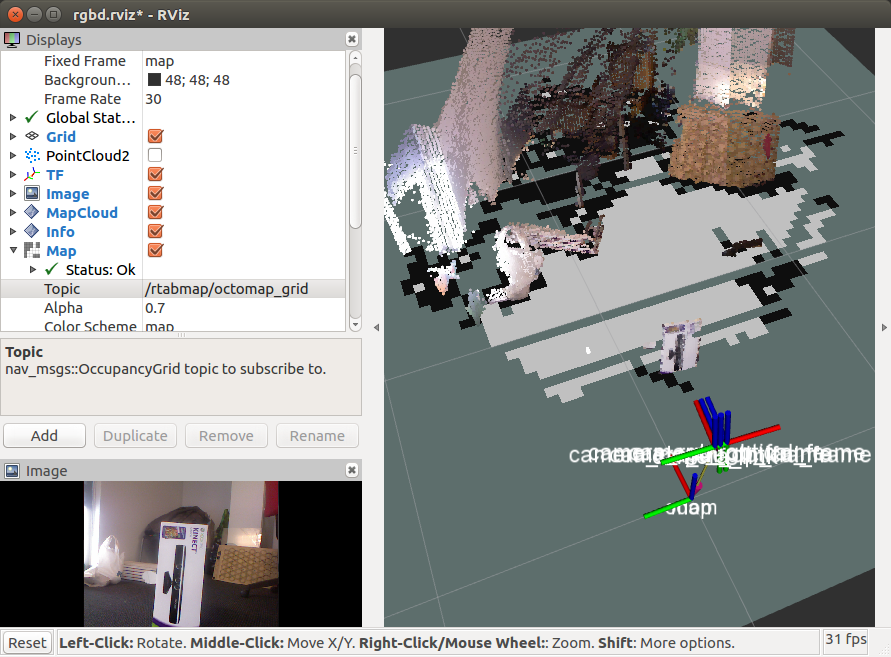 /rtabmap/octomap_grid
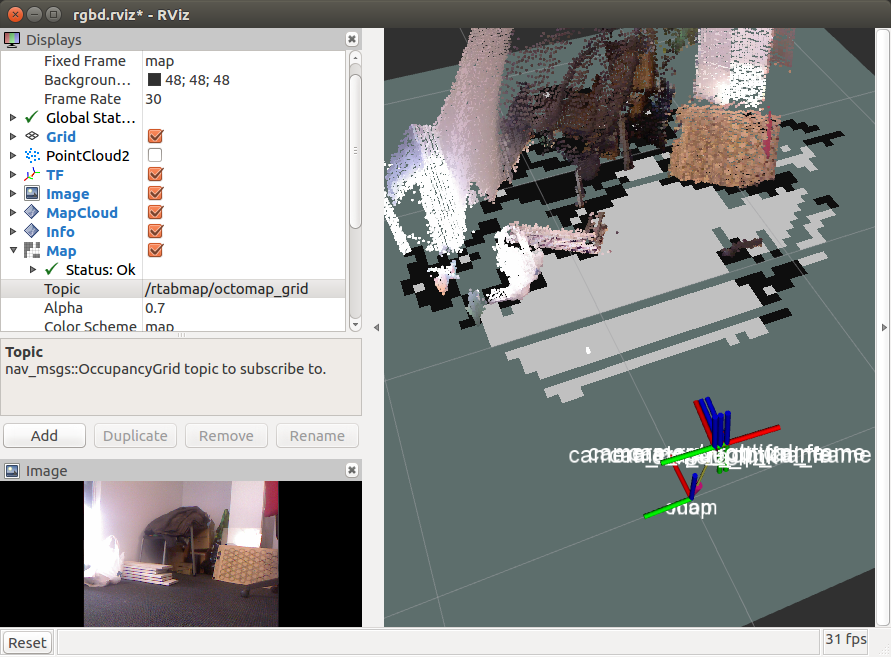
/rtabmap/octomap_grid without object (cells are cleared!):
Normally (as "Grid/3DGroundIsObstacle" is false by default), the ground should not be an obstacle, as shown in the two last screenshots above. Here for example with Grid/3DGroundIsObstacle to true:
$ roslaunch rtabmap_ros rtabmap.launch rviz:=true rtabmapviz:=false rtabmap_args:="--delete_db_on_start --Odom/AlignWithGround true --Grid/3DGroundIsObstacle true"
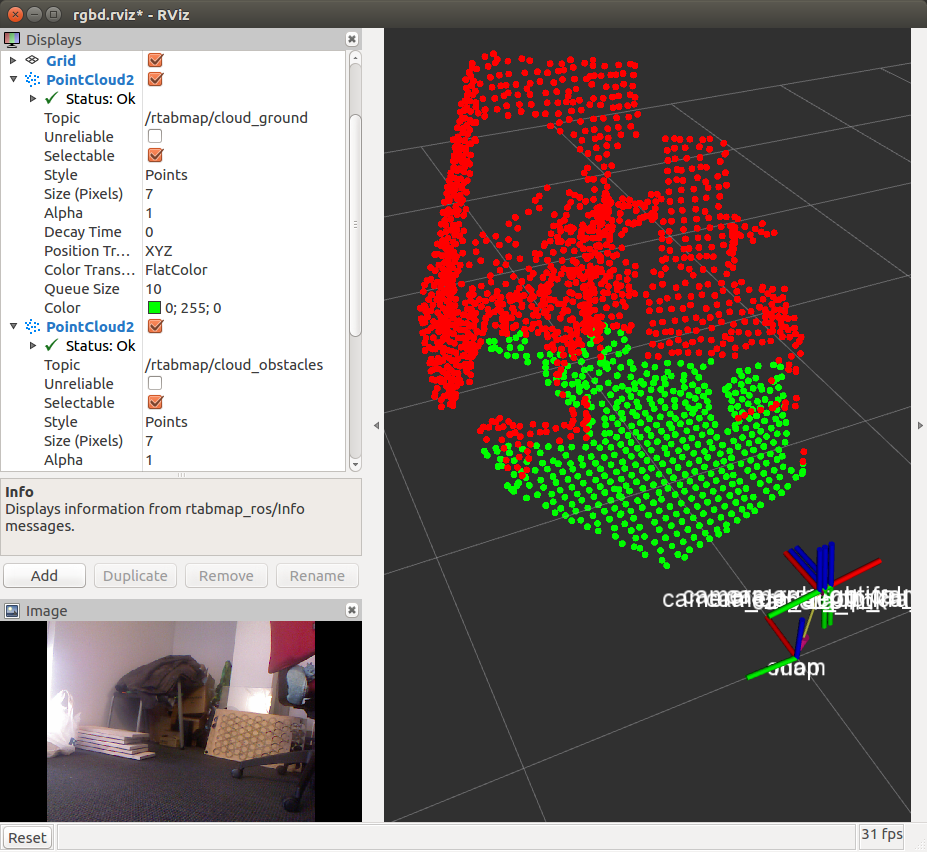
You can change the approach to segment the ground. If you just want to label all points below a fixed height as ground, set "Grid/NormalsSegmentation" to false. Example filtering all points below 5 cm:
$ roslaunch rtabmap_ros rtabmap.launch rviz:=true rtabmapviz:=false rtabmap_args:="--delete_db_on_start --Odom/AlignWithGround true --Grid/NormalsSegmentation false --Grid/MaxGroundHeight 0.05 --Grid/MapFrameProjection true"
I needed to set Grid/MapFrameProjection as I am using an hand-held camera (for which the distance to ground varies). Here showing the
/rtabmap/cloud_ground and
/rtabmap/cloud_obstacles for convenience:
For the last questions:
1. yes, it does it by default
2. With rtabmap standalone, it is not possible.
cheers,
Mathieu