Hi,
I`m trying to create a map using rtabmap in Gazebo. But when I raise the speed of the robot, the map is drawn strangely.
example,
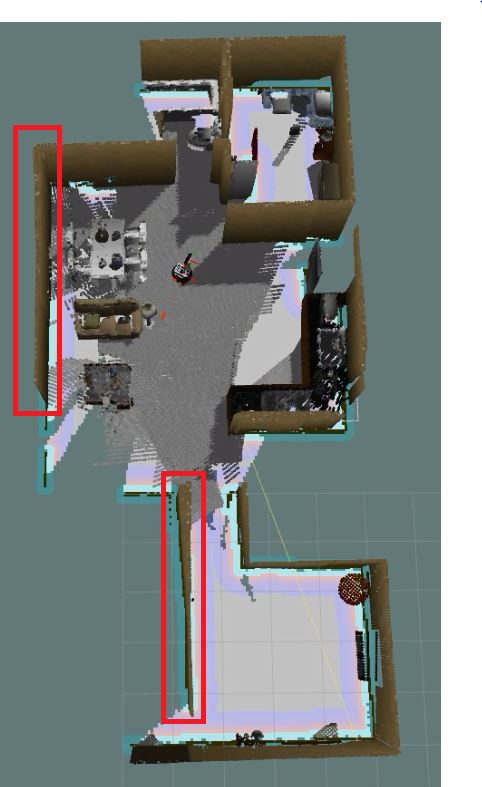
Within the red box, walls of different angles are created. so, map is not created smoothly.
The odometry is correct.
I tried to increase the RTABMAP/DetectionRate, but the map was rather broken.
I`m unsing parameter in "kinect+Odometry+Fake 2D laser from Kinect"
odom updaterate 100Hz, Kinect updaterate 100Hz and robot_state_publisher 100Hz from Gazebo
Have you any idea of what am I doing wrong?
Thanks in advance!

