Hi,
/odom_local_map is in /odom frame:
$ rostopic echo /rtabmap/odom_local_map/header/frame_id
odom
To transform point clouds in some frame, see transformPointCloud functions in pcl_ros:
http://docs.ros.org/api/pcl_ros/html/namespacepcl__ros.htmlNote that /odom_local_map is the odometry local features map, not the actual map of rtabmap. Features of the current frame processed by odometry is in topic /odom_last_frame. When you run the
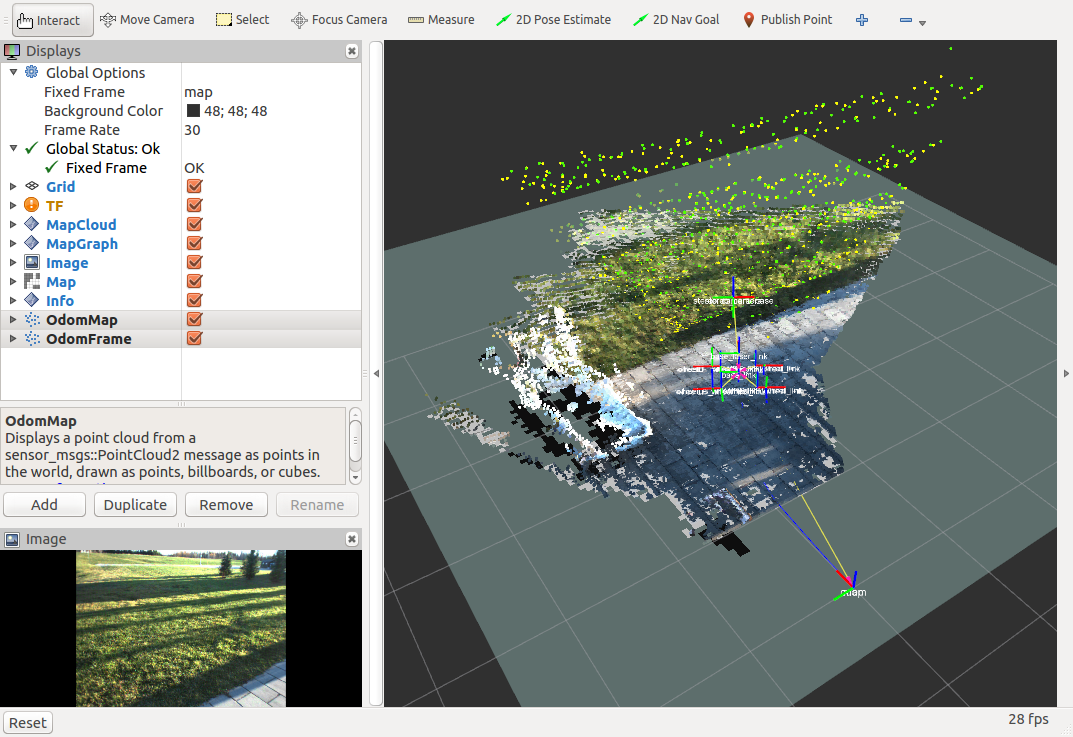
stereo outdoor demo, you can see /odom_last_frame and /odom_local_map shown in RVIZ:
green=current frame, yellow=local map
cheers

