Hi Mathieu,
I'm using rtabmap_ros on the USyd dataset with three cameras, launched by rtabmap_example/usyd_dataset.launch, modified for the three cameras (left, front and right). I have opengv enabled. When I launch a first sequence, it works well. When I launch a second sequence, with the DB saved from the first one, I obtain a segmentation fault from opengv.
By following the rtabmap flow, it happens in util3d_motion_estimation::estimateMotion3DTo2D. Inside Rtabmap::process, during global loop closure is called Memory::computeTransform -> RegistrationVis::computeTransformationImpl -> util3d_motion_estimation::estimateMotion3DTo2D.
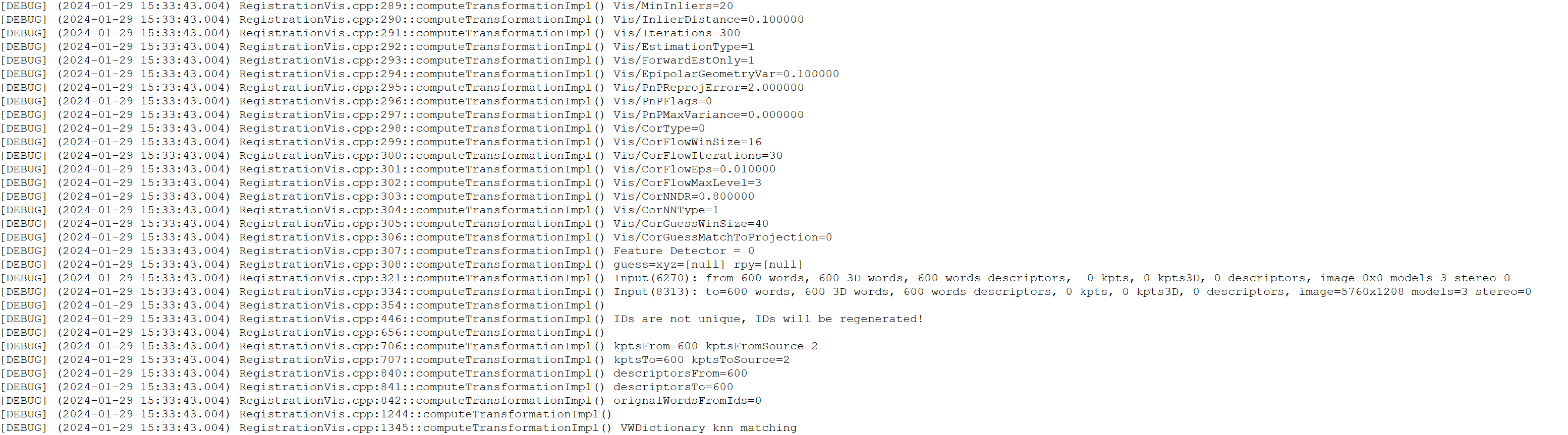
I attach the gdb error. I also printed some parameters as you can see at the top of the images.
I can't understand why it happens.
I attach also the rtabmap log of RegistrationVis::computeTransformationImpl.
Thanks in advance.
Cheers,
Matteo