Do you have warnings coming from rtabmapviz?
You may try first the example shown in
rgbdslam_datasets.launch:
$ wget http://vision.in.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_long_office_household.bag
$ rosbag decompress rgbd_dataset_freiburg3_long_office_household.bag
$ roslaunch rtabmap_ros rgbdslam_datasets.launch feature=6
$ rosbag play -.-clock rgbd_dataset_freiburg3_long_office_household.bag
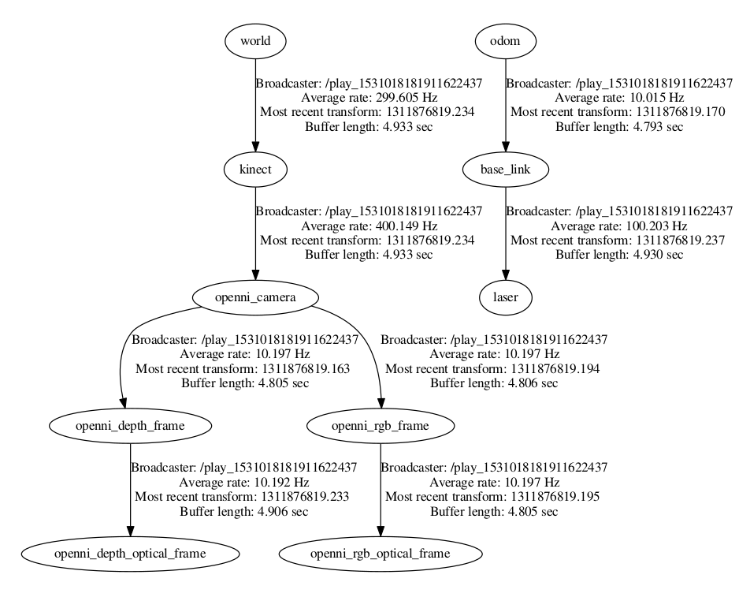
You are using the rosbag with the robot, in which odometry is also provided. IF you try this launch file on this, there will be conflict in TF about the odom frame. You would have to remove rgbd_odometry node from the launch file and set the appropriate odom_frame_id to rtabmap and rtabmapviz nodes.
cheers,
Mathieu