Hi Vlad,
It is strange, the camera seems published at 60 Hz (delay to capture image is around 16 ms):
...
[DEBUG] (2017-08-26 21:10:24.520) RtabmapThread.cpp:330::handleEvent() CameraEvent
[DEBUG] (2017-08-26 21:10:24.536) Camera.cpp:100::takeImage() Time capturing image = 0.016255s
[DEBUG] (2017-08-26 21:10:24.537) CameraThread.cpp:129::mainLoop()
[DEBUG] (2017-08-26 21:10:24.537) RtabmapThread.cpp:330::handleEvent() CameraEvent
[DEBUG] (2017-08-26 21:10:24.538) MainWindow.cpp:897::processOdometry()
[DEBUG] (2017-08-26 21:10:24.538) MainWindow.cpp:940::processOdometry() odom ok
[DEBUG] (2017-08-26 21:10:24.553) Camera.cpp:100::takeImage() Time capturing image = 0.016638s
...
The map seems correctly updated at 1 Hz (default) too:
[DEBUG] (2017-08-26 21:10:07.982) Rtabmap.cpp:847::process()
...
[DEBUG] (2017-08-26 21:10:08.988) Rtabmap.cpp:847::process()
...
[DEBUG] (2017-08-26 21:10:10.001) Rtabmap.cpp:847::process()
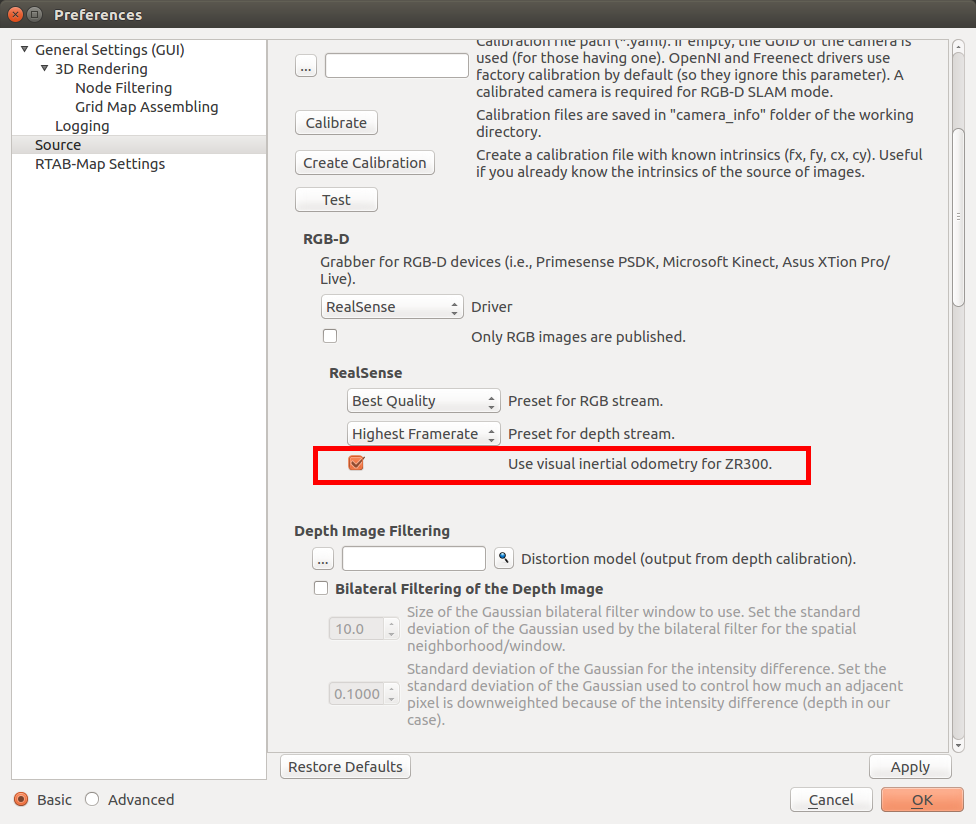
Maybe it is the UI that cannot process all odometry events at 60 Hz, causing UI lags. Close the Odometry view and in Preferences->3D Rendering, uncheck "Show 3D clouds" under Odometry column.
Otherwise, you may do a screencapture, upload the video on youtube as unlisted, then post the link here to better see the lag.
cheers,
Mathieu