hello Mathieu,
wow, I didn't expected such instant reaction and fixing! Thank you so much

I pulled the latest versions and compiling worked flawlessly.
So a 5cm ATE sounds very reasonable, since in your paper, original MSCKF scored 6.0. Very nice achievement!
The red screen in the beginning is because OpenVINS is waiting for some IMU excitation to calibrate. Maybe that is suboptimal in the benchmark, but I can easily include some initial motion before starting task execution (mapping) in real apps.
I think I read somewhere, that continuous online calibration is work in progress currently.
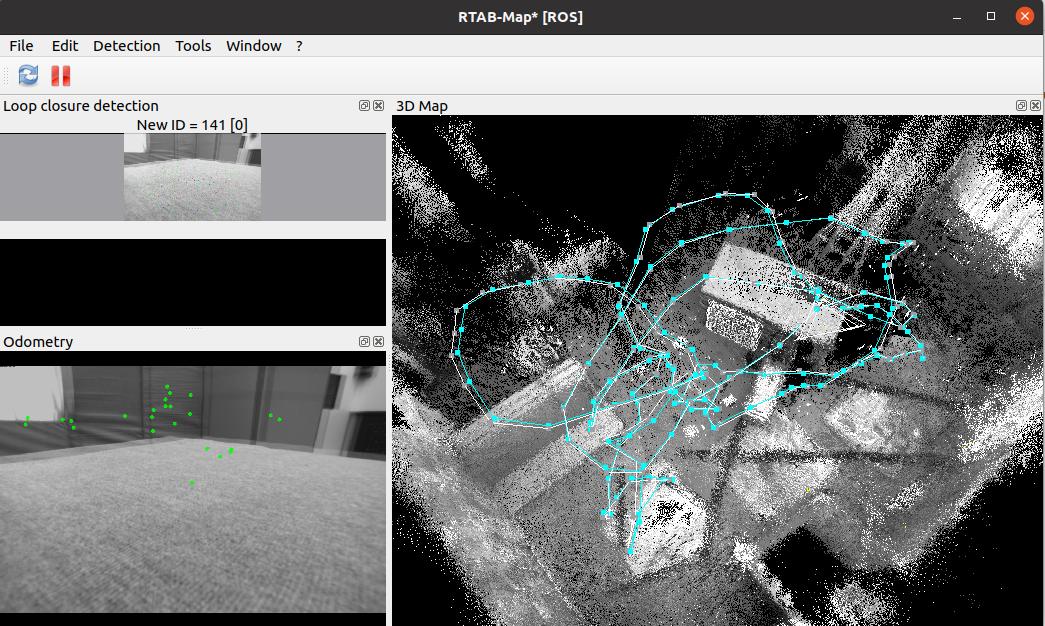
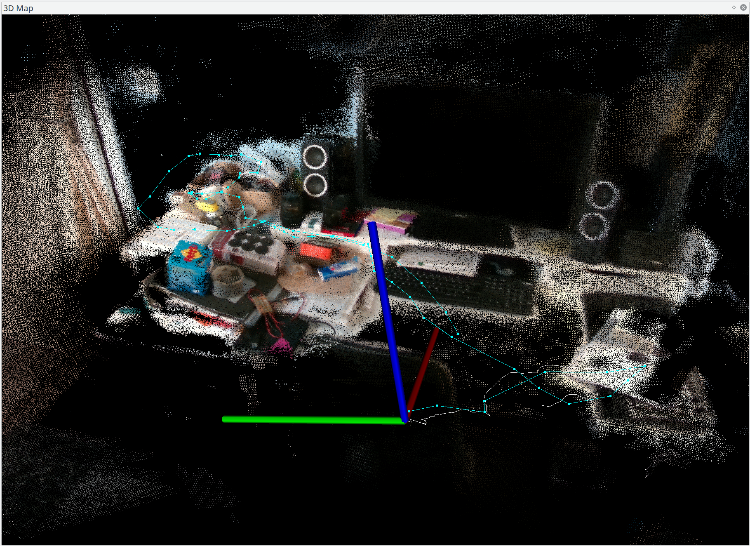
Also quickly tried out the new version of RTABMap-OpenVINS with a RealSense D455 (Infra-Stereo-IMU-Odometry + RGB-D-SLAM). Looks quite good to me:
Thanks again and best regards,
Dominik