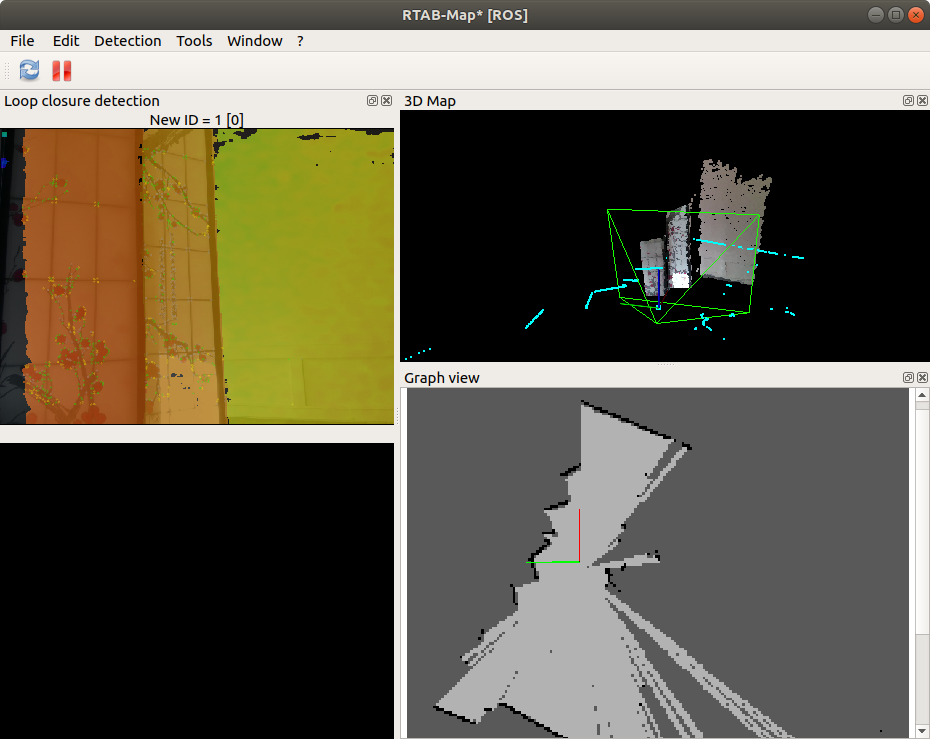
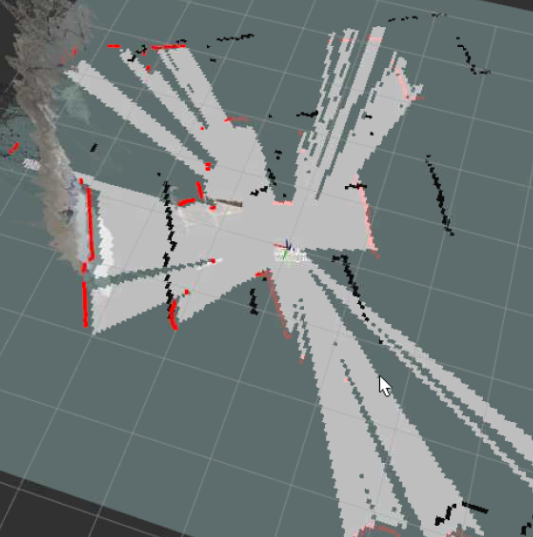
I am currently trying to use both t265 and d415 with rtabmap, though not using intel's provided 3d printed mount. We have a good estimate of the TF between the two cameras and laser_frame, but the grid map seems to be shifted translationally. As shown in the image below, is it just that we need a very precise TF or is there anything wrong with our rtabmap setup?
<launch>
<include file="$(find realsense2_camera)/launch/rs_rgbd_t265_lidar.launch"/>
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start"/>
<arg name="depth_topic" value="/camera/aligned_depth_to_color/image_raw"/>
<arg name="rgb_topic" value="/camera/color/image_raw"/>
<arg name="camera_info_topic" value="/camera/color/camera_info"/>
<arg name="approx_sync" value="true"/>
<arg name="visual_odometry" value="false"/>
<arg name="odom_topic" value="/odometry"/>
<arg name="odom_frame_id" value="t265_odom_frame"/>
<arg name="frame_id" value="t265_link"/>
<arg name="subscribe_scan" value="true"/>
<arg name="scan_topic" value="/scan"/>
<para m name="RGBD/NeighborLinkRefining" type="string" value="true"/>
<para m name="RGBD/ProximityBySpace" type="string" value="true"/>
<para m name="RGBD/AngularUpdate" type="string" value="0.01"/>
<para m name="RGBD/LinearUpdate" type="string" value="0.01"/>
<para m name="RGBD/OptimizeFromGraphEnd" type="string" value="false"/>
<para m name="Grid/FromDepth" type="string" value="false"/>
<para m name="Reg/Force3DoF" type="string" value="true"/>
<para m name="Reg/Strategy" type="string" value="1"/>
<para m name="Icp/VoxelSize" type="string" value="0.05"/>
<para m name="Icp/MaxCorrespondenceDistance" type="string" value="0.1"/>
</include>
</launch>
rs_rgbd_t265_lidar.launch:
everything is the same as the example launch file provided by realsense2_camera but these tfs'
<launch>
....
<node pkg="tf" type="static_transform_publisher" name="t265_to_d400" args="-0.06 0 -0.18 0 -0.1745 0 /t265_link /camera_link 100"/>
<include file="$(find ydlidar)/launch/lidar.launch"/>
<node pkg="tf" type="static_transform_publisher" name="t265_to_ydlidar" args="-0.025 0 -0.07 0 -0.058 -0.055 /t265_link /laser_frame 100"/>
</launch>