Hi Mark,
Did you compare at different distances from the background/objects?
Which PrimeSense sensor are you using? The Carmine 1.09 has an operating range of 0.35 – 1.4 meters and the 1.08 has 0.8 - 3.5 meters. With this kind of sensors, farther features have less reliable depth for good odometry.
I tried your launch files with rtabmap 0.10.12. I only changed in rtabmap.launch "base_footprint" to "base_link" and in openni2.launch I used "debayer_processing=true" and "device.xml.launch" of freenect_launch instead of openni2_launch (I am using a Kinect360):
$ roslaunch openni2.launch depth_registration:=true
$ roslaunch rtabmap.launch
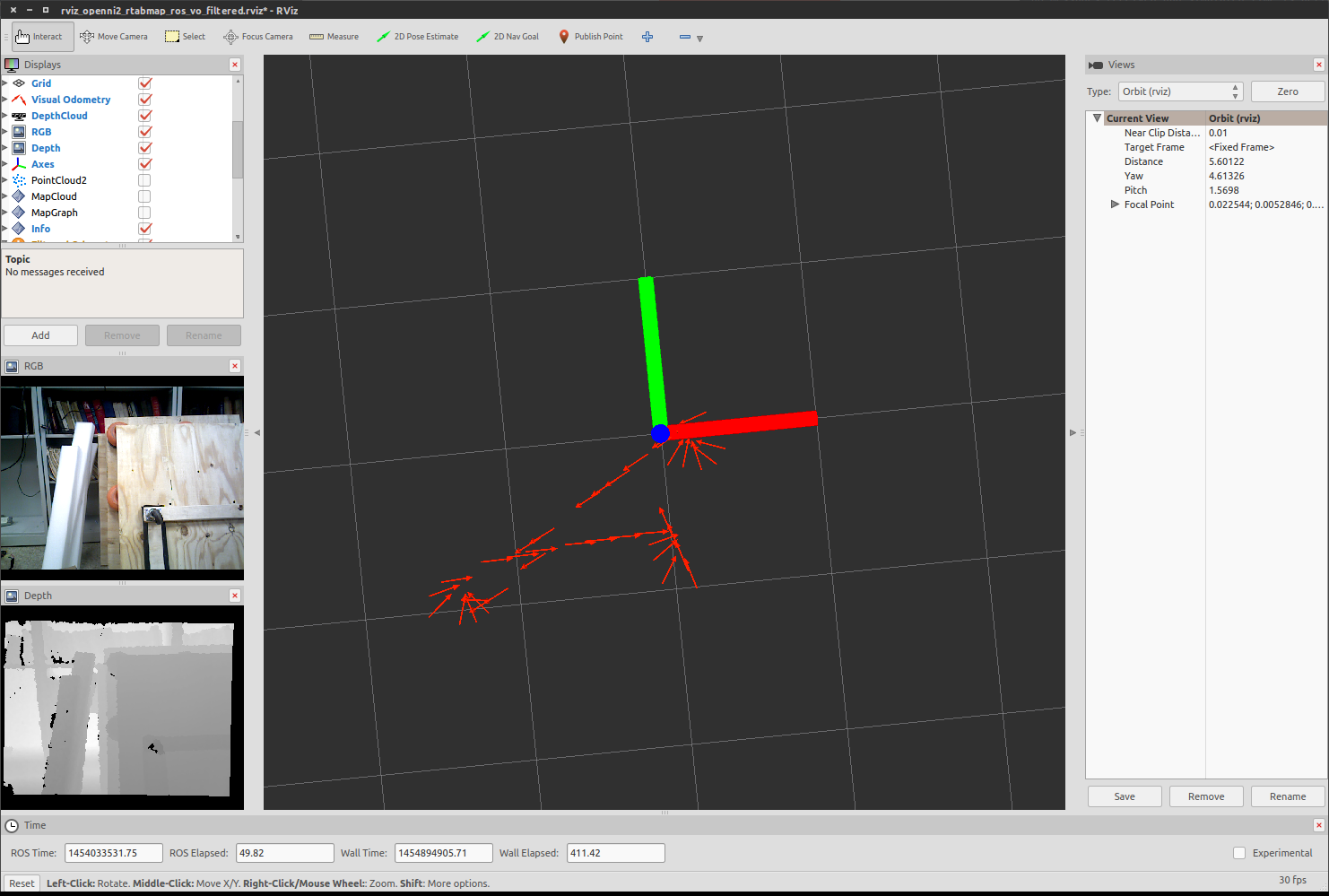
$ rosrun rviz rviz
I've recorded this video with in-place rotations:
https://youtu.be/I_sC1AoIYDUPart 1: Odometry looks ok, the objects are under 2 meters
Part 2: I've put in the air the Kinect over the workspaces so that the background is farther. Odometry has more errors and it's showing a swing behavior. Note how the depth after 4 meters is less precise (look likes depth lines). When most features are tracked at this depth, the odometry may swing because the features are "translating" on the "same" depth value. Note also how shaky the odometry is with farther tracked features.
Part 3: I did like Part 2 but with a closer view. However, it seems this time the odometry got more good close features than in Part 2, so the camera is swinging less.
I've done also a comparison with a Kinect v2, for which the depth is more precise at longer distances:
https://youtu.be/d3YjHvYJZj0. The default base_link used is the color camera, which is on the right of the Kinect, this explains why there is a "correct" swing behavior at start. When putting the Kinect over the workspaces like Parts 2-3 of the previous video, the swing is not higher (thx for precise features under 10 meters).
cheers,
Mathieu