Dear people.
I do have a
Asus Xtion Pro and a
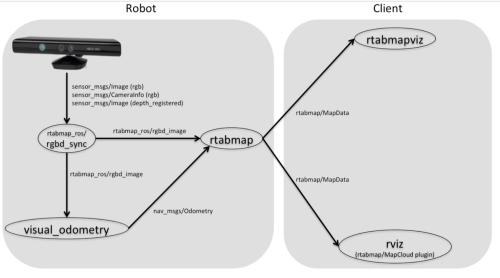
roslaunch was implemented based on
kinect as shown in the picture:
I may say that the 3D mapping was successful, well some problems with the
odometry.
However, I do have a
laser data set and a
rgb data set and I wanted to applied the previous
roslaunch but I could not make it work, specially with the
rgbd_odometry so I decided to search for another kind of
odometry and I found a ros package (
rf2o_laser_odometry_node) that could calculate
odometry based on 2D laser scan, so I converted the 3D pointcloud using the
pointcloud_to_laserscan_node.
Then, I wanted to used the
rtabmap_ros, but I could not open
rtabmapviz and I could not produce any
cloud_map.
So, I decided to used
rtabmap.launch using
subscribe_rgbd and
subscribe_scan_cloud to true.
Now, I can see the map in
rtabmapviz but not in
rviz and also I the loop closure detection between images is very poor I mean practically zero.
I often get this INFO in the terminal
Assembled 0 obstacle and 0 ground clouds (69 points, 0.000042s)I do not know whether
rtabmap.lauch can be used with
subscribe_rgbd and
subscribe_scan_cloud. I suppose it can be used but maybe I am using the wrong parameters or wrong values.
I post the
rtabmap.launch code.
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start --Grid/FromDepth true --Optimizer/GravitySigma 0.3" />
<arg name="frame_id" value="camera_link"/>
<--param name="subscribe_depth" type="bool" value="false"/>
<--param name="subscribe_rgb" type="bool" value="false"/>
<arg name="subscribe_rgbd" value="true"/>
<aeg name="subscribe_scan_cloud" value="true"/>
<--param name="rtabmapviz" type="bool" value="true" />
<arg name="approx_sync" value="true"/>
<arg name="visual_odometry" value="false" />
<remap from="scan_cloud" to="/camera/depth_registered/points"/>
<remap from="rgbd_image" to="/rtabmap/rgbd_image"/>
<remap from="odom" to="/rtabmap/odom"/>
<arg name="queue_size" value="10"/>
<--param name="Vis/MinInliers" type="int" value="6"/>
<--param name="Grid/CellSize" type="string" value="5"/>
<--param name="Odom/MinInliers" type="string" value="6"/>
<--param name="SURF/HessianThreshold" type="int" value="100"/>
<--param name="Grid/RangeMax" type="double" value="0"/>
<--param name="Grid/FromDepth" type="bool" value="true"/>
<--param name="Grid/MaxObstacleHeight" type="string" value="5.0" />
<--param name="Odom/ResetCountdown" value="0" />
<--param name="RGBD/NeighborLinkRefining" type="string" value="true"/>
<--param name="RGBD/ProximityBySpace" type="string" value="true"/>
<--param name="RGBD/AngularUpdate" type="string" value="0.01"/>
<--param name="RGBD/LinearUpdate" type="string" value="0.01"/>
<--param name="RGBD/OptimizeFromGraphEnd" type="string" value="false"/>
<--param name="Grid/FromDepth" type="string" value="false"/>
<--param name="Reg/Force3DoF" type="string" value="true"/>
<--param name="Reg/Strategy" type="string" value="0"/>
<--param name="RGBD/OptimizeMaxError" type="string" value="0"/>
<arg name="odom_tf_angular_variance" value="0.001"/>
<arg name="odom_tf_linear_variance" value="0.001"/>
</include>
I post also the map in
rtabmapviz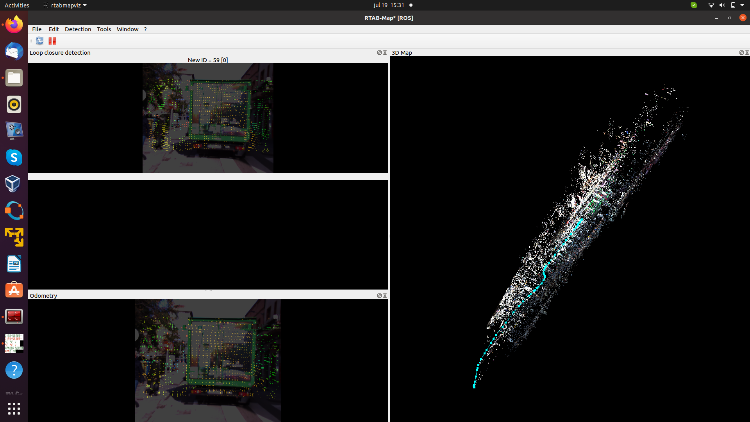
Any help I do appreciate it, thank you

