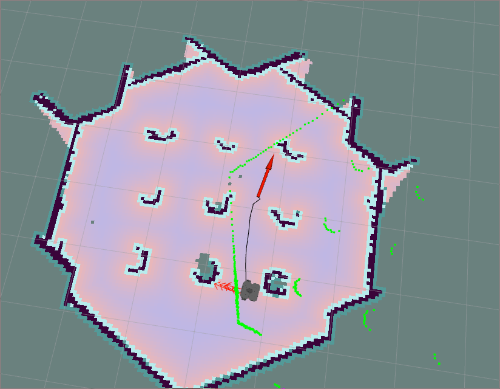
Hello, I am learning rtabmap. I faced such a problem, when I left the robot in navigation mode, I turn on the localization mode on the built map, but before that I physically move the robot to another point. When localization is launched, the robot cannot determine its position, how can I fix it.
Thanks for your reply!
rtabmap terminal:[ WARN] (2021-02-24 19:05:35.997) util3d.cpp:604::cloudFromDepthRGB() Cloud with only NaN values created!
[ INFO] [1614168336.070593797, 849.795000000]: rtabmap (560): Rate=1.00s, Limit=0.000s, RTAB-Map=0.3982s, Maps update=0.0017s pub=0.0003s (local map=28, WM=28)
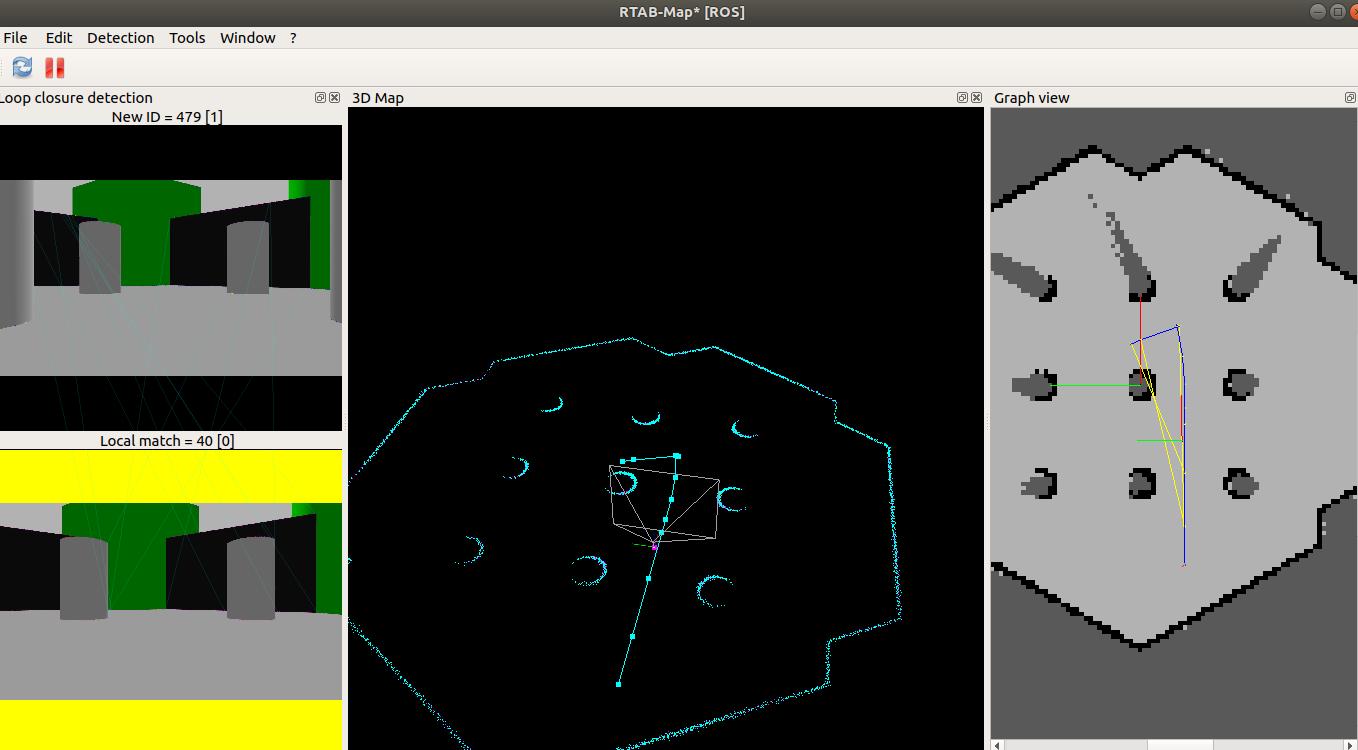
[ WARN] (2021-02-24 19:05:38.247) Rtabmap.cpp:2610::process() Rejected loop closure 53 -> 561: Not enough inliers 0/20 (matches=1) between 53 and 561
[ INFO] [1614168338.250034435, 851.044000000]: rtabmap (561): Rate=1.00s, Limit=0.000s, RTAB-Map=0.6364s, Maps update=0.0014s pub=0.0000s (local map=28, WM=28)
[pcl::IterativeClosestPoint::computeTransformation] Not enough correspondences found. Relax your threshold parameters.
[ WARN] (2021-02-24 19:05:40.158) Rtabmap.cpp:2610::process() Rejected loop closure 56 -> 562: Not enough inliers 0/20 (matches=1) between 56 and 562
[ INFO] [1614168340.161742494, 852.104000000]: rtabmap (562): Rate=1.00s, Limit=0.000s, RTAB-Map=0.6043s, Maps update=0.0012s pub=0.0000s (local map=28, WM=28)