rtabmap mapping mapping publish strange tf


|
Hi there,
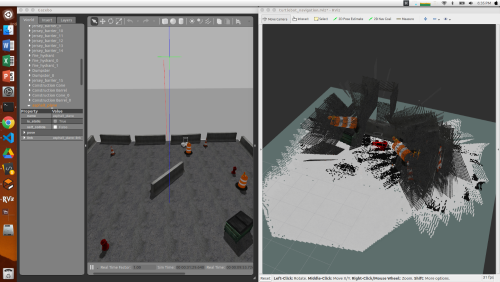
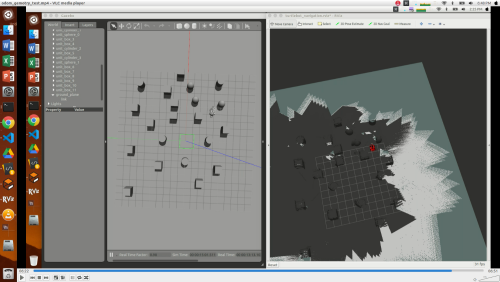
I was trying to simulate rtab with gazebo simulation, this works with simple environment. When I tried on some other 'real' gazebo world, the rtab will sometimes publish strange tf which make all maps messed up. the odom from gazebo is fused with imu so the odom to baselink has barely any drift. IDK what is the reason for the tf error. I suppose it about loop closure issues, wish someone could help me figure it out. The pictures and launch code are shown below.
|
|
Administrator
|
What is the twist covariance set in odom_combined ? With repetitive textures, rtabmap is likely to find wrong loop closures. The only way for rtabmap to reject those loop closures is to have a covariance in odometry not over estimated.
Note that with <!-- If set, TF is used to get odometry instead of the topic --> <arg name="odom_frame_id" default="odom_combined"/> You should set <arg name="odom_tf_angular_variance" default="1"/> <!-- If TF is used to get odometry, this is the default angular variance --> <arg name="odom_tf_linear_variance" default="1"/> <!-- If TF is used to get odometry, this is the default linear variance -->to match your odometry covariance. With wheel odometry, you could set them as: <arg name="odom_tf_angular_variance" default="0.005"/> <!-- If TF is used to get odometry, this is the default angular variance --> <arg name="odom_tf_linear_variance" default="0.001"/> <!-- If TF is used to get odometry, this is the default linear variance -->Enable graph check rejection (this can detect wrong loop closures): <param name="RGBD/OptimizeMaxError" type="string" value="3"/> cheers, Mathieu |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |