Well, I'm trying to run rtabmap_ros as follows:
$ roslaunch openni_launch openni.launch epth_registration:=true
I'm able to see images with image_view, then I launch:
$ roslaunch rtabmap_ros rgbd_mapping.launch
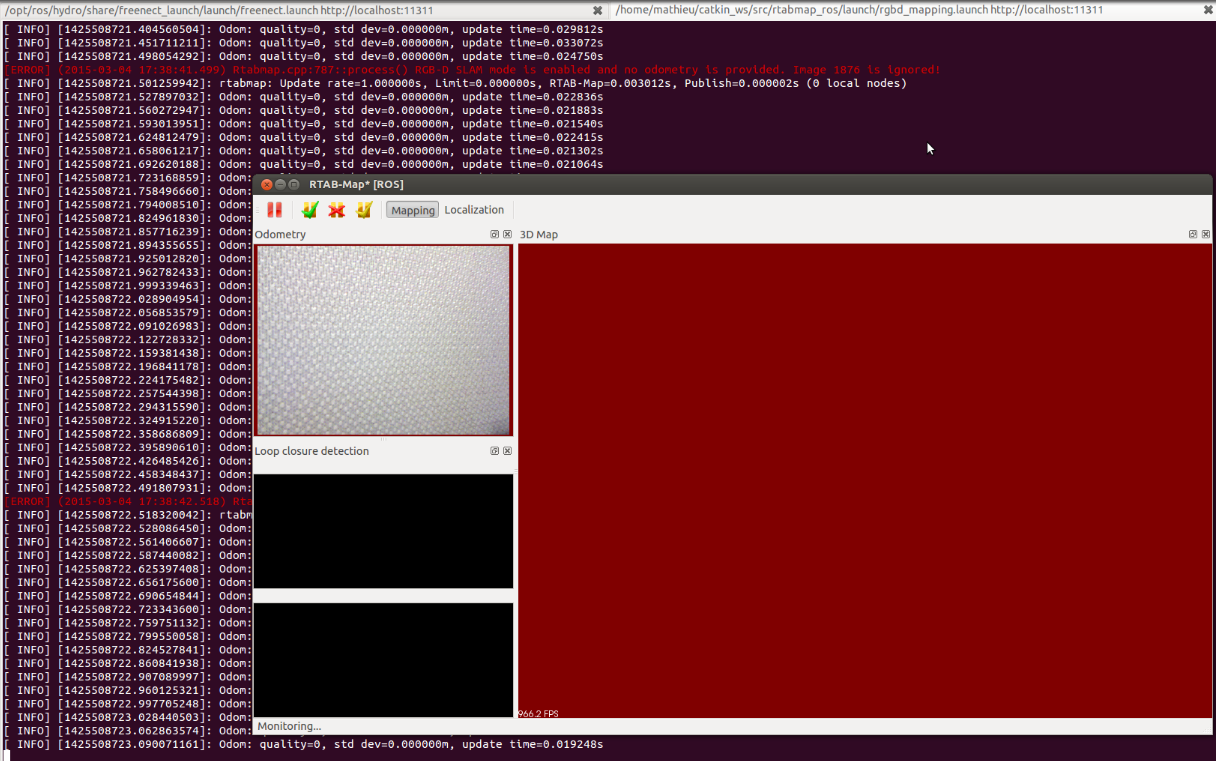
I get a full red screen:
and output like this:
[ERROR] (2015-03-04 15:26:55.235) Rtabmap.cpp:765::process() RGB-D SLAM mode is enabled and no odometry is provided. Image 5199 is ignored!
[ WARN] [1425504415.235607772]: RTAB-Map could not process the data received! (ROS id = 5199)
[ INFO] [1425504415.235884877]: rtabmap: Update rate=1.000000s, Limit=0.000000s, Processing time = 0.002142s (0 local nodes)
[ INFO] [1425504415.267266252]: Odom: quality=0, std dev=0.000000m, update time=0.015722s
[ INFO] [1425504415.302719136]: Odom: quality=0, std dev=0.000000m, update time=0.017705s
[ INFO] [1425504415.336289643]: Odom: quality=0, std dev=0.000000m, update time=0.018709s
[ INFO] [1425504415.368390019]: Odom: quality=0, std dev=0.000000m, update time=0.020951s
[ INFO] [1425504415.399961113]: Odom: quality=0, std dev=0.000000m, update time=0.015746s
[ INFO] [1425504415.434737200]: Odom: quality=0, std dev=0.000000m, update time=0.017660s
[ INFO] [1425504415.467373605]: Odom: quality=0, std dev=0.000000m, update time=0.018482s
^C[ INFO] [1425504415.501161444]: Odom: quality=0, std dev=0.000000m, update time=0.016055s
[ INFO] [1425504415.533500475]: Odom: quality=0, std dev=0.000000m, update time=0.016272s
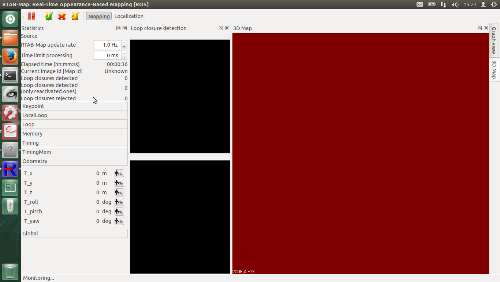
Then I tried with rviz:
$ roslaunch rtabmap_ros rgbd_mapping_rviz.launch
I got this screen:
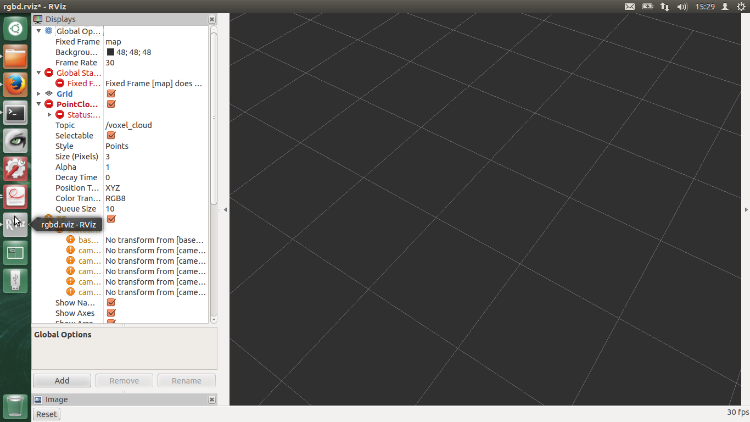
And the same output as above.
System specs:
- Ubuntu 12.04 with ROS Hydro
- Kinect Xbox 360
- Openni driver
Thanks in advance,
Micke.