Hi, finally I found a Kinect 360 model 1414 and it works ok on mu odroid computer.
So, I've started to test remote mapping.
On odroid run:
export ROS_IP=10.10.10.5
roslaunch freenect_launch freenect.launch depth_registration:=true data_skip:=2
roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start --Vis/MaxFeatures 500 --Mem/ImagePreDecimation 2 --Mem/ImagePostDecimation 2 --Kp/DetectorStrategy 6 --OdomF2M/MaxSize 1000 --Odom/ImageDecimation 2" rtabmapviz:=false
On client PC I've run:
$ export ROS_MASTER_URI=http://10.10.10.5:11311
$ export ROS_IP=10.10.10.101
$ ROS_NAMESPACE=rtabmap
$ rosrun rtabmap_ros rtabmapviz _subscribe_odom_info:=false _frame_id:=camera_link
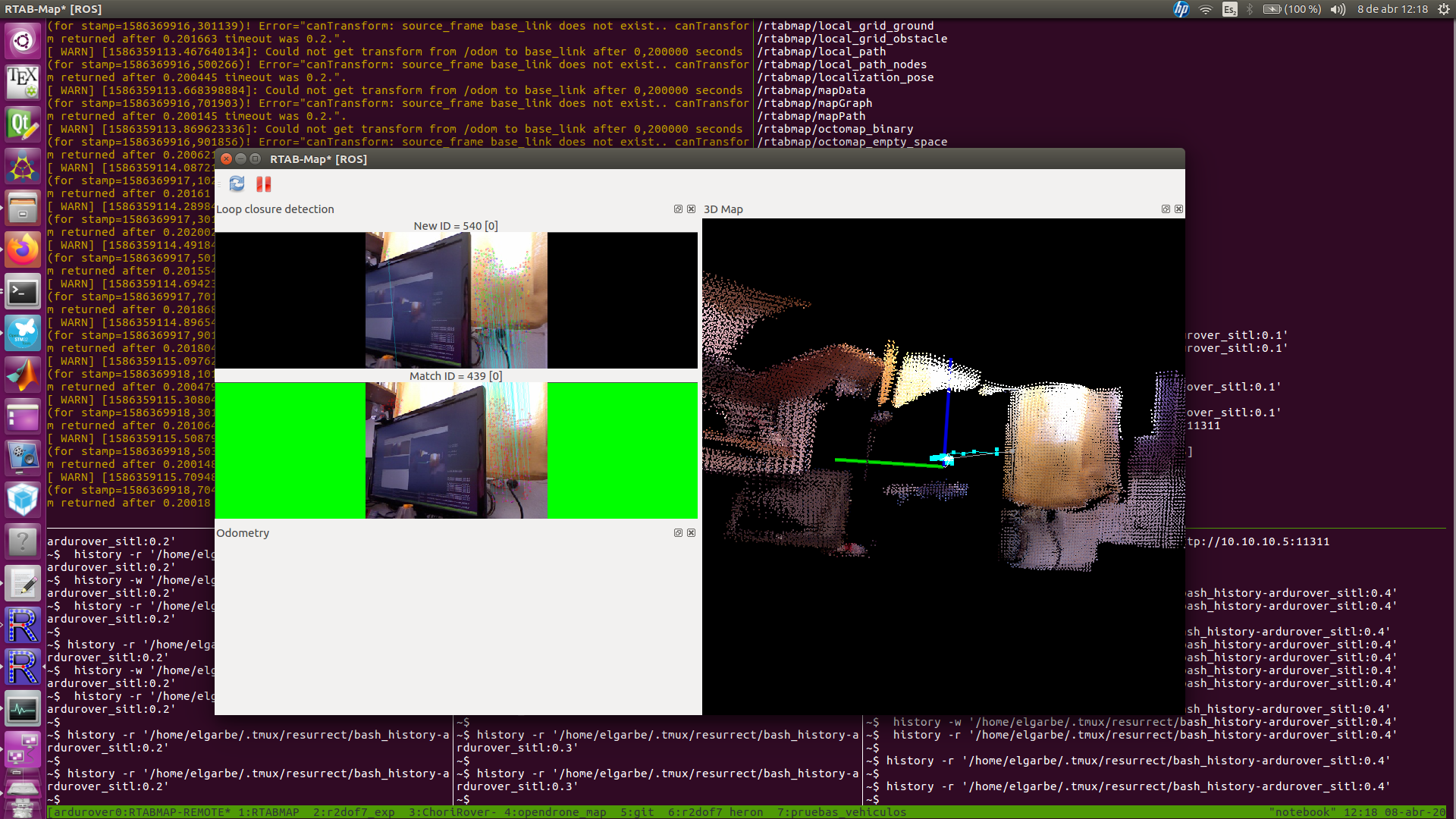
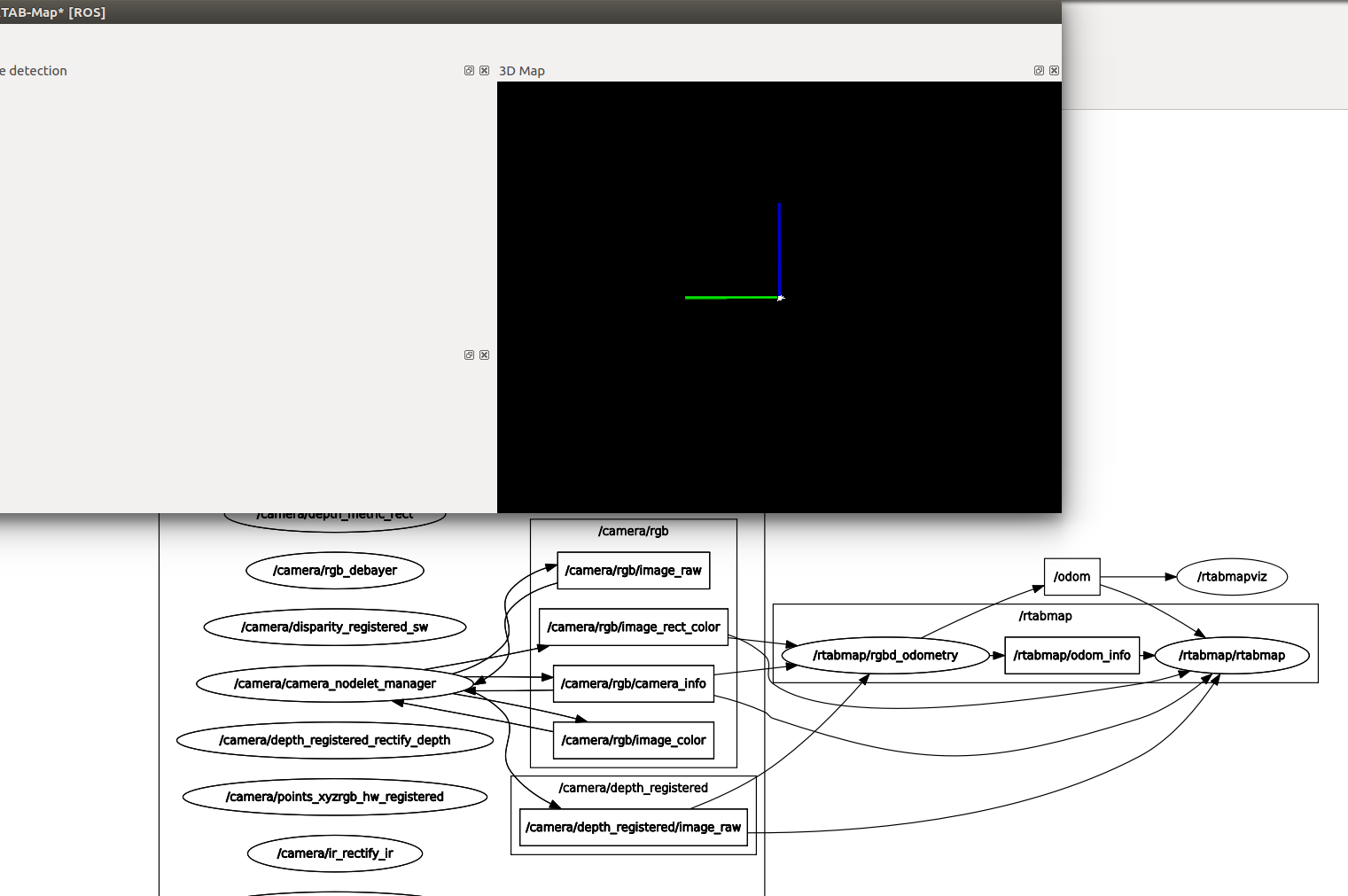
rtabmap_viz is opened but it doen't show any pointcloud nor image on their boxes. I've just see a little withe line (seems to be odometry) moving a little and moving more when I move kinect.
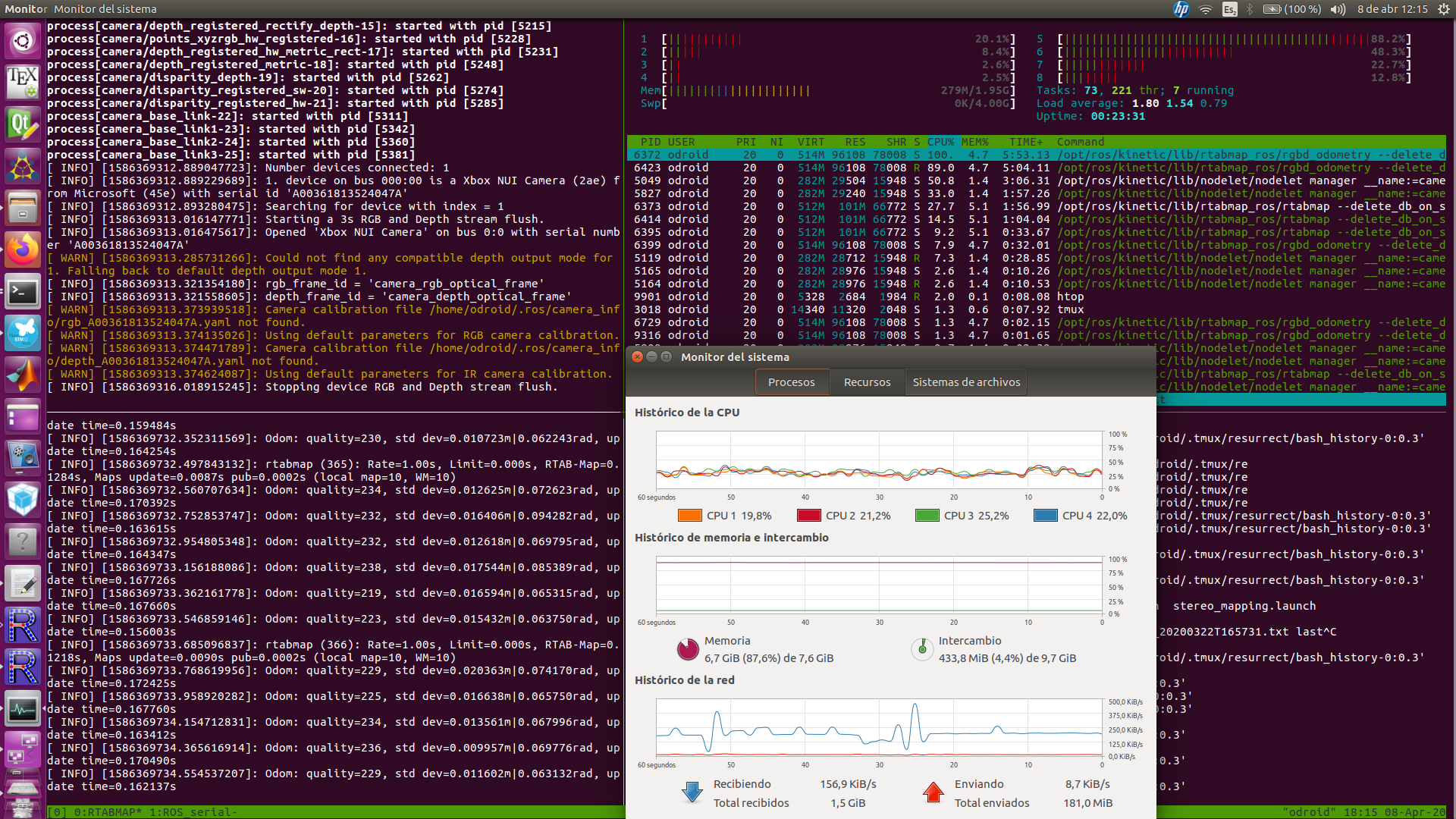
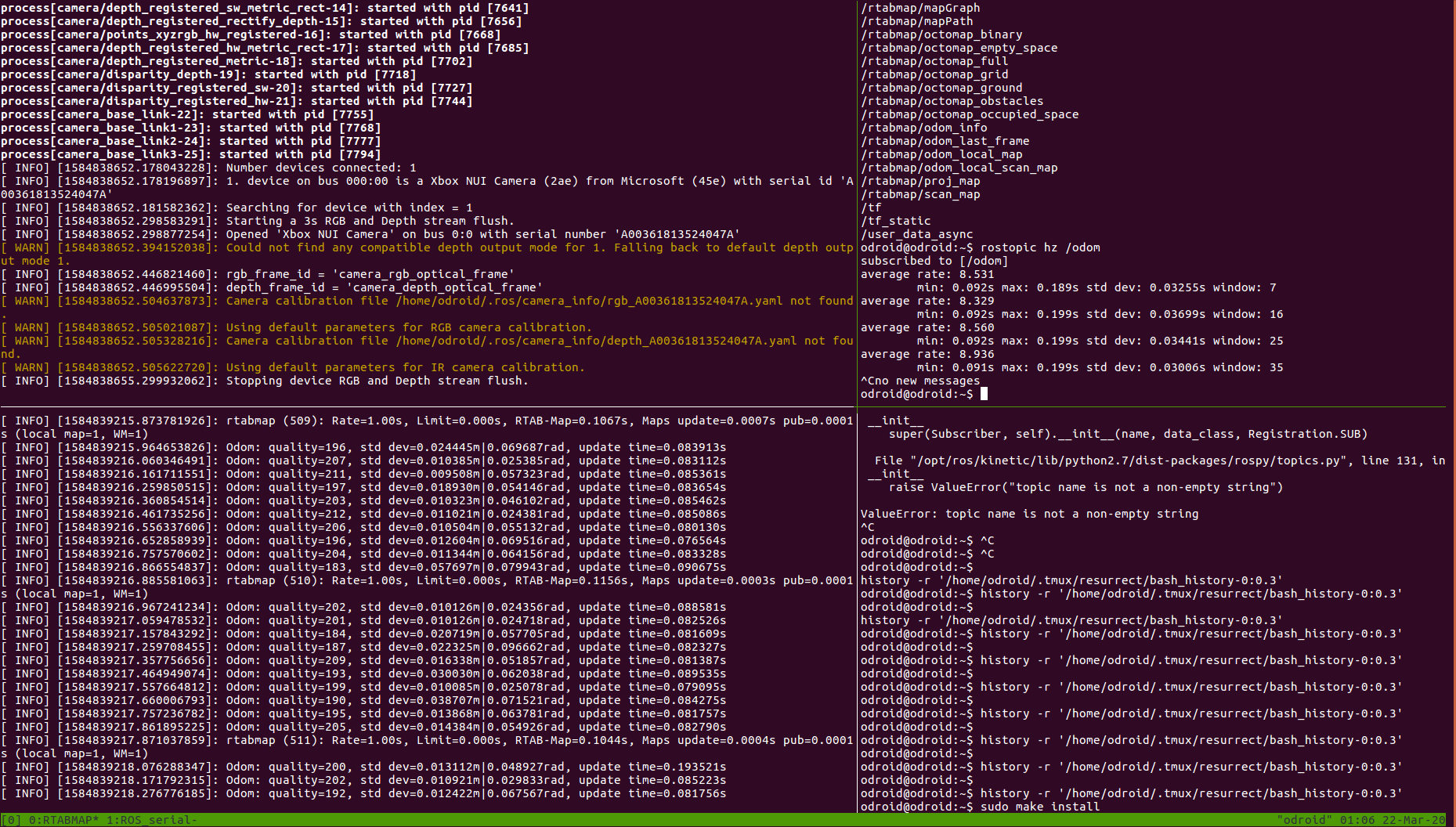
This is my odroid computer terminals:
my client pc terminals
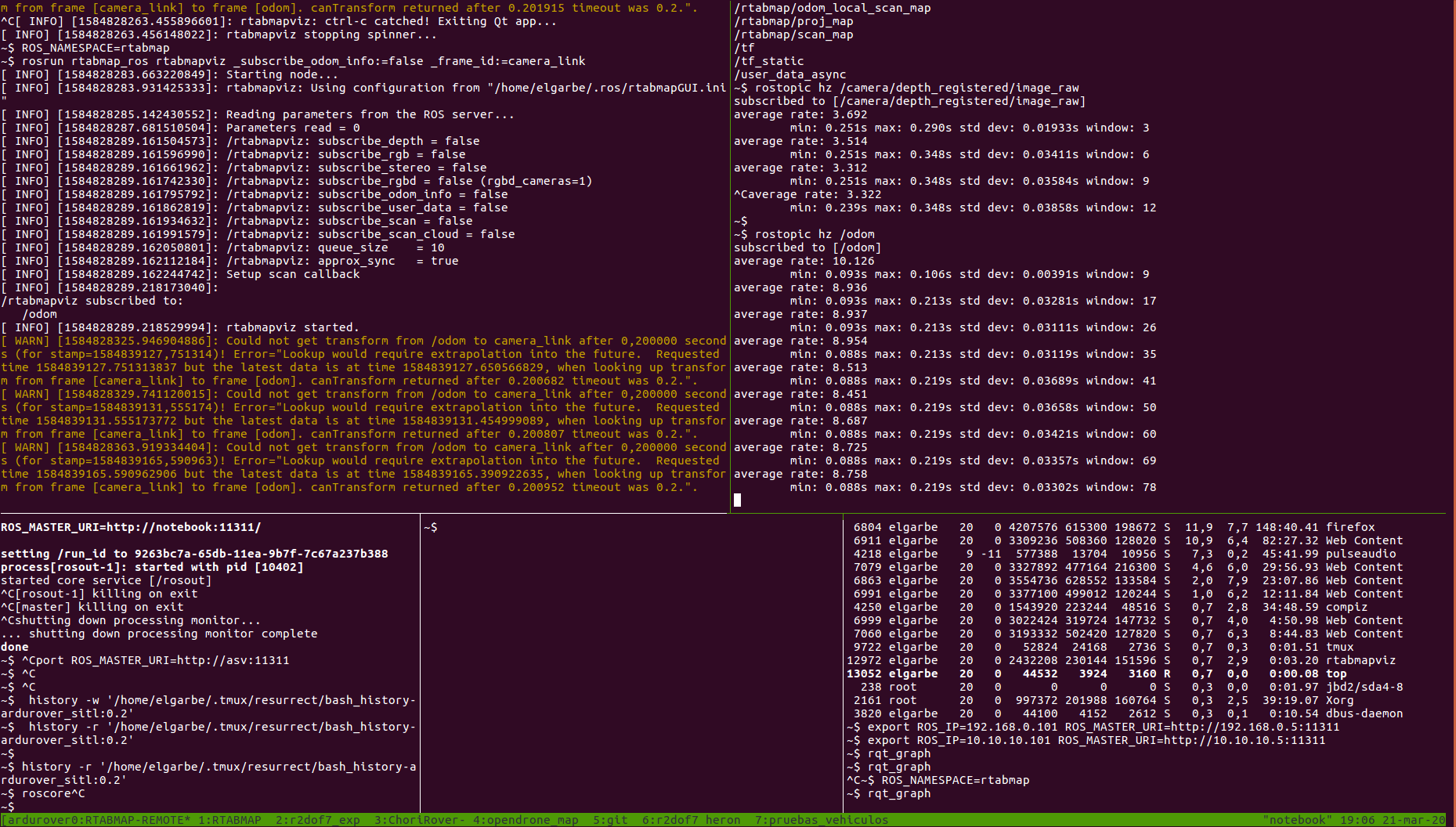
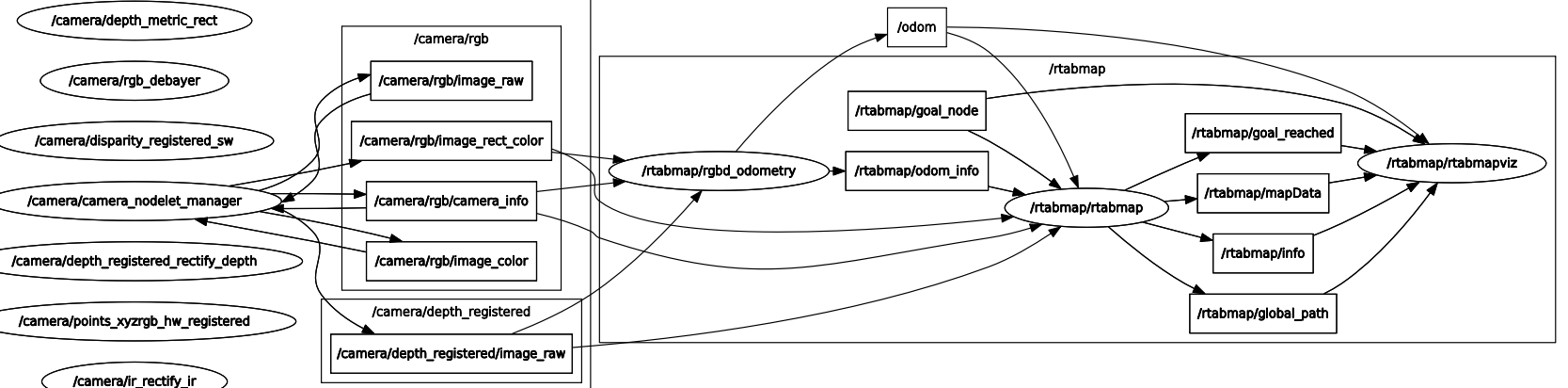
and rqt_graph/rtabmap_viz:
In my client PC I can do:
rosrun image_view image_view image:=/camera/depth_registered/image_raw
or
rosrun image_view image_view image:=/camera/rgb/image_raw
and see image at 2/3 Hz. /odm is publish at 8 Hz.
What do I do wrong?
My robot is publishing odom messages (disabled right now, until get mapping working with visual odometry) What do I need to modify to use that odometry? the topic is /odom
~$ apt-cache policy ros-kinetic-rtabmap
ros-kinetic-rtabmap:
Instalados: 0.19.3-1xenial-20200229-051923+0000
Candidato: 0.19.3-1xenial-20200229-051923+0000
Thank!