rtabmap-ros/rtabmap is not publishing a map->odom transform

rtabmap-ros/rtabmap is not publishing a map->odom transform

|
Hello. I have a rtabmap setup that currently is not using any sensor fusion, but is trying to use visual odometry provided by a ZED camera. I assume I can simply change this later once I setup the sensor fusion, but right now I have a different problem. When I run rtabmap, even with visual_odometry on, it doesn't publish any transform from odom to map! Any help is greatly appreciated.
|
|
Administrator
|
Hi,
Which rtabmap version you are using? /map -> /odom is published only if rtabmap is receiving data on its inputs. For convenience in recent versions, you would have this warning on the terminal: telling what could be the cause. cheers, Mathieu |
Re: rtabmap-ros/rtabmap is not publishing a map->odom transform
|
|
Thanks for the quick reply, but unfortunately I do not get that error message in the console. I just updated rtabmap to the newest version from apt, and the problem still occurs. Any ideas?
|
|
Administrator
|
If you are on Indigo or Jade, the binaries don't have the warning message. Some things to verify: are you using two machines? Are input topics published? Have they all timstamps set?
|
Re: rtabmap-ros/rtabmap is not publishing a map->odom transform
|
|
I'm using Kinetic, only one machine, all input topics are published, and they all have timestamps.
|
|
Administrator
|
Hi,
Can you show what command lines you are using? I just tried with Kinetic binaries and ZED (following this tutorial) and it works. Note that I updated the wiki of the tutorial with a missing TF causing this error on start:
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" depth_topic:=/camera/depth/depth_registered
... logging to /home/mathieu/.ros/log/c2402fe8-0f33-11e7-86aa-2016d8fd6b78/roslaunch-mathieu-Aspire-MC605-3416.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://mathieu-Aspire-MC605:44551/
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.7
* /rtabmap/rgbd_odometry/approx_sync: True
* /rtabmap/rgbd_odometry/config_path:
* /rtabmap/rgbd_odometry/frame_id: camera_link
* /rtabmap/rgbd_odometry/queue_size: 10
* /rtabmap/rgbd_odometry/wait_for_transform_duration: 0.2
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/approx_sync: True
* /rtabmap/rtabmap/config_path:
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: camera_link
* /rtabmap/rtabmap/odom_frame_id:
* /rtabmap/rtabmap/queue_size: 10
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_scan: False
* /rtabmap/rtabmap/subscribe_scan_cloud: False
* /rtabmap/rtabmap/subscribe_stereo: False
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
* /rtabmap/rtabmapviz/approx_sync: True
* /rtabmap/rtabmapviz/frame_id: camera_link
* /rtabmap/rtabmapviz/odom_frame_id:
* /rtabmap/rtabmapviz/queue_size: 10
* /rtabmap/rtabmapviz/subscribe_depth: True
* /rtabmap/rtabmapviz/subscribe_odom_info: True
* /rtabmap/rtabmapviz/subscribe_scan: False
* /rtabmap/rtabmapviz/subscribe_scan_cloud: False
* /rtabmap/rtabmapviz/subscribe_stereo: False
* /rtabmap/rtabmapviz/wait_for_transform_duration: 0.2
NODES
/rtabmap/
rgbd_odometry (rtabmap_ros/rgbd_odometry)
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
ROS_MASTER_URI=http://localhost:11311
core service [/rosout] found
process[rtabmap/rgbd_odometry-1]: started with pid [3434]
process[rtabmap/rtabmap-2]: started with pid [3435]
process[rtabmap/rtabmapviz-3]: started with pid [3436]
[ INFO] [1490210118.282822477]: Starting node...
[ INFO] [1490210118.396866627]: Initializing nodelet with 8 worker threads.
[ INFO] [1490210118.397973891]: Initializing nodelet with 8 worker threads.
[ INFO] [1490210118.690431223]: Starting node...
[ INFO] [1490210118.841203310]: /rtabmap/rtabmap(maps): grid_cell_size = 0.050000
[ INFO] [1490210118.841245913]: /rtabmap/rtabmap(maps): grid_incremental = false
[ INFO] [1490210118.841282929]: /rtabmap/rtabmap(maps): grid_size = 0.000000
[ INFO] [1490210118.841333913]: /rtabmap/rtabmap(maps): grid_eroded = false
[ INFO] [1490210118.841368624]: /rtabmap/rtabmap(maps): grid_footprint_radius = 0.000000
[ INFO] [1490210118.841401031]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1490210118.841425755]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1490210118.841456345]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1490210118.841477228]: /rtabmap/rtabmap(maps): map_negative_poses_ignored = false
[ INFO] [1490210118.841505025]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1490210118.841541761]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1490210118.841599171]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1490210118.844335413]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1490210118.844387724]: /rtabmap/rtabmap(maps): octomap_occupancy_thr = 0.500000
[ INFO] [1490210118.893696106]: rtabmap: frame_id = camera_link
[ INFO] [1490210118.893741084]: rtabmap: map_frame_id = map
[ INFO] [1490210118.893776564]: rtabmap: tf_delay = 0.050000
[ INFO] [1490210118.893819237]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1490210118.893857719]: rtabmap: odom_sensor_sync = false
[ INFO] [1490210119.052108343]: rtabmapviz: Using configuration from "/home/mathieu/.ros/rtabmap_gui.ini"
[ INFO] [1490210119.223944498]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
[ INFO] [1490210119.224735939]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false"
[ INFO] [1490210119.402974516]:
/rtabmap/rgbd_odometry subscribed to (approx sync):
/camera/rgb/image_rect_color,
/camera/depth/depth_registered,
/camera/rgb/camera_info
[ INFO] [1490210119.771955218]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1490210119.790748606]: rtabmap: Deleted database "/home/mathieu/.ros/rtabmap.db" (--delete_db_on_start is set).
[ INFO] [1490210119.790820263]: rtabmap: Using database from "/home/mathieu/.ros/rtabmap.db".
[ WARN] [1490210119.851514105]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210119.490623) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201607 timeout was 0.2."
[ WARN] [1490210120.055447716]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210119.787670) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.20137 timeout was 0.2."
[ WARN] [1490210120.259507949]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210119.957544) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201531 timeout was 0.2."
[ WARN] [1490210120.463284487]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210120.179567) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201451 timeout was 0.2."
[ WARN] [1490210120.667069615]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210120.400791) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201406 timeout was 0.2."
[ WARN] [1490210120.872130603]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210120.568178) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201535 timeout was 0.2."
[ WARN] [1490210121.076050175]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210120.791711) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201517 timeout was 0.2."
[ WARN] [1490210121.286687572]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210121.020711) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201464 timeout was 0.2."
[ WARN] [1490210121.490489809]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210121.199101) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201666 timeout was 0.2."
[ WARN] [1490210121.694750624]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210121.420505) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201492 timeout was 0.2."
[ WARN] [1490210121.903064330]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210121.640732) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201406 timeout was 0.2."
[ WARN] [1490210122.106813208]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210121.808840) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201442 timeout was 0.2."
[ WARN] [1490210122.310792212]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210122.029053) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201395 timeout was 0.2."
[ WARN] [1490210122.514743209]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210122.249627) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201513 timeout was 0.2."
[ WARN] [1490210122.718691134]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210122.416467) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201446 timeout was 0.2."
[ WARN] [1490210122.922658754]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210122.646202) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201797 timeout was 0.2."
[ WARN] [1490210123.132765353]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210122.868527) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201764 timeout was 0.2."
[ INFO] [1490210123.273730947]: Reading parameters from the ROS server...
[ INFO] [1490210123.291117940]: rtabmap: Database version = "0.11.13".
[ WARN] [1490210123.336816641]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210123.041173) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201497 timeout was 0.2."
[ INFO] [1490210123.350229035]: /rtabmap/rtabmap: queue_size = 10
[ INFO] [1490210123.350286724]: /rtabmap/rtabmap: rgbd_cameras = 1
[ INFO] [1490210123.350328350]: /rtabmap/rtabmap: approx_sync = true
[ INFO] [1490210123.350435067]: Setup depth callback
[ INFO] [1490210123.462930202]:
/rtabmap/rtabmap subscribed to (approx sync):
/rtabmap/odom,
/camera/rgb/image_rect_color,
/camera/depth/depth_registered,
/camera/rgb/camera_info
[ INFO] [1490210123.463038945]: rtabmap 0.11.13 started...
[ INFO] [1490210123.485488804]: Parameters read = 257
[ INFO] [1490210123.485525750]: Parameters successfully read.
[ WARN] [1490210123.549364892]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210123.279896) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201724 timeout was 0.2."
[ INFO] [1490210123.675614294]: /rtabmap/rtabmapviz: queue_size = 10
[ INFO] [1490210123.675666675]: /rtabmap/rtabmapviz: rgbd_cameras = 1
[ INFO] [1490210123.675690980]: /rtabmap/rtabmapviz: approx_sync = true
[ INFO] [1490210123.675740428]: Setup depth callback
[ WARN] [1490210123.753371901]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210123.457299) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201773 timeout was 0.2."
[ INFO] [1490210123.786050997]:
/rtabmap/rtabmapviz subscribed to (approx sync):
/rtabmap/odom,
/camera/rgb/image_rect_color,
/camera/depth/depth_registered,
/camera/rgb/camera_info,
/rtabmap/odom_info
[ INFO] [1490210123.786135505]: rtabmapviz started.
[ WARN] [1490210123.968184128]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210123.693297) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201534 timeout was 0.2."
[ WARN] [1490210124.172313916]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210123.878151) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201697 timeout was 0.2."
[ WARN] [1490210124.389844993]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210124.120955) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201502 timeout was 0.2."
[ WARN] [1490210124.593676559]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210124.297980) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201478 timeout was 0.2."
[ WARN] [1490210124.797748728]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210124.525978) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201472 timeout was 0.2."
[ WARN] [1490210125.017628917]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210124.748884) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201678 timeout was 0.2."
[ WARN] [1490210125.223773136]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210124.931996) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201814 timeout was 0.2."
[ WARN] [1490210125.429876918]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210125.116921) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201738 timeout was 0.2."
[ WARN] [1490210125.640427215]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210125.368519) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201542 timeout was 0.2."
[ WARN] [1490210125.844448329]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210125.546922) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201582 timeout was 0.2."
[ WARN] [1490210126.048116184]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210125.770713) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201425 timeout was 0.2."
[ WARN] [1490210126.252137925]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210125.945416) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201469 timeout was 0.2."
[ WARN] [1490210126.455979056]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210126.176382) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201567 timeout was 0.2."
[ WARN] [1490210126.664772494]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210126.399602) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201554 timeout was 0.2."
[ WARN] [1490210126.869514298]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210126.572293) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201658 timeout was 0.2."
[ WARN] [1490210127.077959647]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210126.810060) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.20202 timeout was 0.2."
[ WARN] [1490210127.282370262]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210126.980296) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201476 timeout was 0.2."
[ WARN] [1490210127.486679119]: odometry: Could not get transform from camera_link to /ZED_left_camera (stamp=1490210127.205820) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error=". canTransform returned after 0.201946 timeout was 0.2."
When adding the missing TF to /zed_current_frame -> /ZED_left_camera: [ INFO] [1490210324.674563730]: Odom: quality=104, std dev=0.000929m|0.000676rad, update time=0.042725s [ INFO] [1490210324.720396979]: Odom: quality=117, std dev=0.000712m|0.000345rad, update time=0.042102s [ INFO] [1490210324.780766710]: Odom: quality=91, std dev=0.000646m|0.000422rad, update time=0.055222s [ INFO] [1490210324.819878120]: Odom: quality=133, std dev=0.000736m|0.000581rad, update time=0.027264s [ INFO] [1490210324.872434187]: Odom: quality=123, std dev=0.000883m|0.000645rad, update time=0.029083s [ INFO] [1490210324.944438439]: Odom: quality=106, std dev=0.000517m|0.000275rad, update time=0.041484s [ INFO] [1490210325.008146846]: Odom: quality=113, std dev=0.000752m|0.000595rad, update time=0.035414s [ INFO] [1490210325.034209178]: rtabmap (1): Rate=1.00s, Limit=0.000s, RTAB-Map=0.4628s, Maps update=0.0067s pub=0.0006s (local map=1, WM=1) [ INFO] [1490210325.077120425]: Odom: quality=123, std dev=0.001013m|0.000814rad, update time=0.036080s [ INFO] [1490210325.134421418]: Odom: quality=103, std dev=0.000530m|0.000369rad, update time=0.032154s [ INFO] [1490210325.210774180]: Odom: quality=125, std dev=0.000658m|0.000454rad, update time=0.033096s [ INFO] [1490210325.267592084]: Odom: quality=105, std dev=0.000705m|0.000414rad, update time=0.027960s [ INFO] [1490210325.337363944]: Odom: quality=127, std dev=0.000775m|0.000409rad, update time=0.030469s [ INFO] [1490210325.419820594]: Odom: quality=130, std dev=0.000913m|0.000588rad, update time=0.041098s [ INFO] [1490210325.467979619]: rtabmap (2): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1254s, Maps update=0.0013s pub=0.0004s (local map=1, WM=1) [ INFO] [1490210325.483478161]: Odom: quality=121, std dev=0.000934m|0.000648rad, update time=0.038697s [ INFO] [1490210325.545799949]: Odom: quality=114, std dev=0.000569m|0.000223rad, update time=0.027600s [ INFO] [1490210325.626370754]: Odom: quality=127, std dev=0.000476m|0.000389rad, update time=0.043699s [ INFO] [1490210325.689138966]: Odom: quality=114, std dev=0.000864m|0.000673rad, update time=0.034958s [ INFO] [1490210325.757259507]: Odom: quality=122, std dev=0.001031m|0.000820rad, update time=0.040375s [ INFO] [1490210325.832399342]: Odom: quality=122, std dev=0.001541m|0.001183rad, update time=0.043826s [ INFO] [1490210325.894133279]: Odom: quality=102, std dev=0.000625m|0.000498rad, update time=0.038509s [ INFO] [1490210325.959232781]: Odom: quality=134, std dev=0.000977m|0.000677rad, update time=0.029600s [ INFO] [1490210326.011453964]: Odom: quality=103, std dev=0.000744m|0.000558rad, update time=0.029359s [ INFO] [1490210326.077886244]: Odom: quality=99, std dev=0.001066m|0.000738rad, update time=0.029439s [ INFO] [1490210326.148119897]: Odom: quality=153, std dev=0.000929m|0.000510rad, update time=0.031076s [ INFO] [1490210326.217347630]: Odom: quality=121, std dev=0.000756m|0.000386rad, update time=0.029219s [ INFO] [1490210326.282076001]: Odom: quality=126, std dev=0.000814m|0.000575rad, update time=0.031420s [ INFO] [1490210326.351671516]: Odom: quality=122, std dev=0.000599m|0.000226rad, update time=0.033645s [ INFO] [1490210326.442984909]: Odom: quality=143, std dev=0.000739m|0.000645rad, update time=0.043409s [ INFO] [1490210326.492546203]: rtabmap (3): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1348s, Maps update=0.0032s pub=0.0003s (local map=1, WM=1) [ INFO] [1490210326.508064161]: Odom: quality=117, std dev=0.000738m|0.000456rad, update time=0.040052s [ INFO] [1490210326.573146346]: Odom: quality=119, std dev=0.000806m|0.000592rad, update time=0.033314s [ INFO] [1490210326.638907874]: Odom: quality=107, std dev=0.001002m|0.000675rad, update time=0.029622s TF tree ($rosrun tf view_frames) when everything is running: 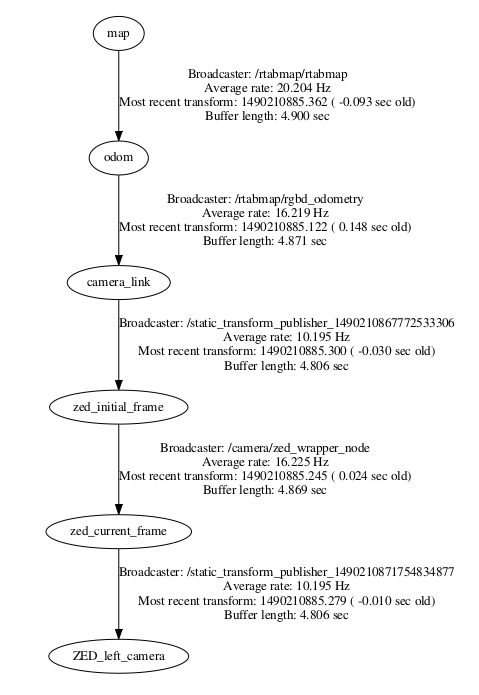 cheers, Mathieu |
Re: rtabmap-ros/rtabmap is not publishing a map->odom transform
|
|
Some combination of that and using the zed_wrapper_node alone as it says in the tutorial ended up solving the problem! Thanks!
|
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |