Hi !
I got an issue when I start rtabmap_ros with realsense d415
My d415 publishes in the following topics:
/camera/color/image_raw
/camera/depthimage_rect_raw
/camera/depth/color/points
so I have modified the rgbd_mapping.launch to subscribe to these topics with realsense d415. I named this new launch file rtabmap_rgbd.launch
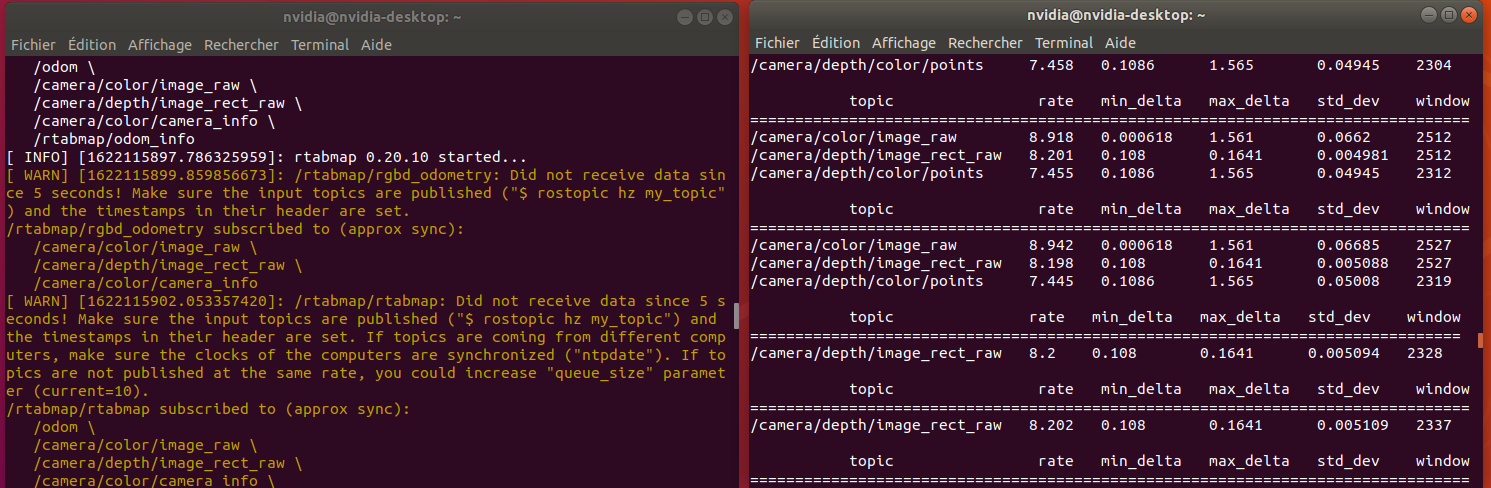
I run realsense2_camera demo_pointcloud.launch in order to get messages in the topics, but when I start rtabmap_rgbd.launch, the camera node stop as you can see:
I am on NVIDIA Jetson Xavier NX, 4.9.201-tegra kernel
I tried the experience on an Ubuntu 18.04 5.4.0-73-generic and all works well
I manage to build all required libraries and compile my catkin_ws
However I have an issue with my camera on the frame rates I don't have with ubuntu, may is it linked
You can find the issue I have here:
https://github.com/IntelRealSense/realsense-ros/issues/1899Thank you

