rtabmap with odometry


|
Hi
I want to run Rtabmap with odometry from my lidar and lidar data. As you said in Ros I have nav_mas/sensor and /scan topics but when I want to run Rtabmap with the launch file that you said in ((http://wiki.ros.org/rtabmap_ros/Tutorials/SetupOnYourRobot)) part 2.1, I will see these warnings : [ WARN] [1566201573.950171179]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10). /rtabmap/rtabmap subscribed to (approx sync): /base_controller/odom, /rtabmap/rgbd_image, /base_scan and heren my topic that publishes : /base_controller/odom /base_scan /camera/depth/camera_info /camera/depth/image /camera/depth/image/compressed /camera/depth/image/compressed/parameter_descriptions /camera/depth/image/compressed/parameter_updates /camera/depth/image/compressedDepth /camera/depth/image/compressedDepth/parameter_descriptions /camera/depth/image/compressedDepth/parameter_updates /camera/depth/image/theora /camera/depth/image/theora/parameter_descriptions /camera/depth/image/theora/parameter_updates /camera/depth/image_raw /camera/depth/image_raw/compressed /camera/depth/image_raw/compressed/parameter_descriptions /camera/depth/image_raw/compressed/parameter_updates /camera/depth/image_raw/compressedDepth /camera/depth/image_raw/compressedDepth/parameter_descriptions /camera/depth/image_raw/compressedDepth/parameter_updates /camera/depth/image_raw/theora /camera/depth/image_raw/theora/parameter_descriptions /camera/depth/image_raw/theora/parameter_updates /camera/depth/image_rect /camera/depth/image_rect/compressed /camera/depth/image_rect/compressed/parameter_descriptions /camera/depth/image_rect/compressed/parameter_updates /camera/depth/image_rect/compressedDepth /camera/depth/image_rect/compressedDepth/parameter_descriptions /camera/depth/image_rect/compressedDepth/parameter_updates /camera/depth/image_rect/theora /camera/depth/image_rect/theora/parameter_descriptions /camera/depth/image_rect/theora/parameter_updates /camera/depth/image_rect_raw /camera/depth/image_rect_raw/compressed /camera/depth/image_rect_raw/compressed/parameter_descriptions /camera/depth/image_rect_raw/compressed/parameter_updates /camera/depth/image_rect_raw/compressedDepth /camera/depth/image_rect_raw/compressedDepth/parameter_descriptions /camera/depth/image_rect_raw/compressedDepth/parameter_updates /camera/depth/image_rect_raw/theora /camera/depth/image_rect_raw/theora/parameter_descriptions /camera/depth/image_rect_raw/theora/parameter_updates /camera/depth/points /camera/depth_rectify_depth/parameter_descriptions /camera/depth_rectify_depth/parameter_updates /camera/depth_registered/camera_info /camera/depth_registered/hw_registered/image_rect /camera/depth_registered/hw_registered/image_rect/compressed /camera/depth_registered/hw_registered/image_rect/compressed/parameter_descriptions /camera/depth_registered/hw_registered/image_rect/compressed/parameter_updates /camera/depth_registered/hw_registered/image_rect/compressedDepth /camera/depth_registered/hw_registered/image_rect/compressedDepth/parameter_descriptions /camera/depth_registered/hw_registered/image_rect/compressedDepth/parameter_updates /camera/depth_registered/hw_registered/image_rect/theora /camera/depth_registered/hw_registered/image_rect/theora/parameter_descriptions /camera/depth_registered/hw_registered/image_rect/theora/parameter_updates /camera/depth_registered/hw_registered/image_rect_raw /camera/depth_registered/hw_registered/image_rect_raw/compressed /camera/depth_registered/hw_registered/image_rect_raw/compressed/parameter_descriptions /camera/depth_registered/hw_registered/image_rect_raw/compressed/parameter_updates /camera/depth_registered/hw_registered/image_rect_raw/compressedDepth /camera/depth_registered/hw_registered/image_rect_raw/compressedDepth/parameter_descriptions /camera/depth_registered/hw_registered/image_rect_raw/compressedDepth/parameter_updates /camera/depth_registered/hw_registered/image_rect_raw/theora /camera/depth_registered/hw_registered/image_rect_raw/theora/parameter_descriptions /camera/depth_registered/hw_registered/image_rect_raw/theora/parameter_updates /camera/depth_registered/image /camera/depth_registered/image/compressed /camera/depth_registered/image/compressed/parameter_descriptions /camera/depth_registered/image/compressed/parameter_updates /camera/depth_registered/image/compressedDepth /camera/depth_registered/image/compressedDepth/parameter_descriptions /camera/depth_registered/image/compressedDepth/parameter_updates /camera/depth_registered/image/theora /camera/depth_registered/image/theora/parameter_descriptions /camera/depth_registered/image/theora/parameter_updates /camera/depth_registered/image_raw /camera/depth_registered/image_raw/compressed /camera/depth_registered/image_raw/compressed/parameter_descriptions /camera/depth_registered/image_raw/compressed/parameter_updates /camera/depth_registered/image_raw/compressedDepth /camera/depth_registered/image_raw/compressedDepth/parameter_descriptions /camera/depth_registered/image_raw/compressedDepth/parameter_updates /camera/depth_registered/image_raw/theora /camera/depth_registered/image_raw/theora/parameter_descriptions /camera/depth_registered/image_raw/theora/parameter_updates /camera/depth_registered/points /camera/depth_registered_rectify_depth/parameter_descriptions /camera/depth_registered_rectify_depth/parameter_updates /camera/driver/parameter_descriptions /camera/driver/parameter_updates /camera/ir/camera_info /camera/ir/image /camera/ir/image/compressed /camera/ir/image/compressed/parameter_descriptions /camera/ir/image/compressed/parameter_updates /camera/ir/image/compressedDepth /camera/ir/image/compressedDepth/parameter_descriptions /camera/ir/image/compressedDepth/parameter_updates /camera/ir/image/theora /camera/ir/image/theora/parameter_descriptions /camera/ir/image/theora/parameter_updates /camera/projector/camera_info /camera/rgb/camera_info /camera/rgb/image_raw /camera/rgb/image_raw/compressed /camera/rgb/image_raw/compressed/parameter_descriptions /camera/rgb/image_raw/compressed/parameter_updates /camera/rgb/image_raw/compressedDepth /camera/rgb/image_raw/compressedDepth/parameter_descriptions /camera/rgb/image_raw/compressedDepth/parameter_updates /camera/rgb/image_raw/theora /camera/rgb/image_raw/theora/parameter_descriptions /camera/rgb/image_raw/theora/parameter_updates /camera/rgb/image_rect_color /camera/rgb/image_rect_color/compressed /camera/rgb/image_rect_color/compressed/parameter_descriptions /camera/rgb/image_rect_color/compressed/parameter_updates /camera/rgb/image_rect_color/compressedDepth /camera/rgb/image_rect_color/compressedDepth/parameter_descriptions /camera/rgb/image_rect_color/compressedDepth/parameter_updates /camera/rgb/image_rect_color/theora /camera/rgb/image_rect_color/theora/parameter_descriptions /camera/rgb/image_rect_color/theora/parameter_updates /camera/rgb_rectify_color/parameter_descriptions /camera/rgb_rectify_color/parameter_updates /diagnostics /laser_status /odom /rosout /rosout_agg /rtabmap/cloud_ground /rtabmap/cloud_map /rtabmap/cloud_obstacles /rtabmap/global_path /rtabmap/global_path_nodes /rtabmap/global_pose /rtabmap/goal /rtabmap/goal_node /rtabmap/goal_out /rtabmap/goal_reached /rtabmap/gps/fix /rtabmap/grid_map /rtabmap/grid_prob_map /rtabmap/imu /rtabmap/info /rtabmap/initialpose /rtabmap/labels /rtabmap/landmarks /rtabmap/local_grid_empty /rtabmap/local_grid_ground /rtabmap/local_grid_obstacle /rtabmap/local_path /rtabmap/local_path_nodes /rtabmap/localization_pose /rtabmap/mapData /rtabmap/mapGraph /rtabmap/mapPath /rtabmap/octomap_binary /rtabmap/octomap_empty_space /rtabmap/octomap_full /rtabmap/octomap_grid /rtabmap/octomap_ground /rtabmap/octomap_obstacles /rtabmap/octomap_occupied_space /rtabmap/proj_map /rtabmap/rgbd_image /rtabmap/rgbd_image/compressed /rtabmap/scan_map /rtabmap/user_data_async /scan /tf /tf_static /urg_node/parameter_descriptions /urg_node/parameter_updates and here is my rqt_graph : |
|
Administrator
|
Hi,
You may have to change those remaps to your actual topics used: <remap from="odom" to="/base_controller/odom"/> <remap from="scan" to="/base_scan"/> |
|
|
Hi again,thanks for your help , I didn't get you, my topic from my laser scanner is" /scan" and odometry message from rf2o is "/odom" is there any problem now?
as I said before all of my topics is here : rostopic list /base_controller/odom /base_scan /camera/depth/camera_info /camera/depth/image /camera/depth/image/compressed /camera/depth/image/compressed/parameter_descriptions /camera/depth/image/compressed/parameter_updates /camera/depth/image/compressedDepth /camera/depth/image/compressedDepth/parameter_descriptions /camera/depth/image/compressedDepth/parameter_updates /camera/depth/image/theora /camera/depth/image/theora/parameter_descriptions /camera/depth/image/theora/parameter_updates /camera/depth/image_raw /camera/depth/image_raw/compressed /camera/depth/image_raw/compressed/parameter_descriptions /camera/depth/image_raw/compressed/parameter_updates /camera/depth/image_raw/compressedDepth /camera/depth/image_raw/compressedDepth/parameter_descriptions /camera/depth/image_raw/compressedDepth/parameter_updates /camera/depth/image_raw/theora /camera/depth/image_raw/theora/parameter_descriptions /camera/depth/image_raw/theora/parameter_updates /camera/depth/image_rect /camera/depth/image_rect/compressed /camera/depth/image_rect/compressed/parameter_descriptions /camera/depth/image_rect/compressed/parameter_updates /camera/depth/image_rect/compressedDepth /camera/depth/image_rect/compressedDepth/parameter_descriptions /camera/depth/image_rect/compressedDepth/parameter_updates /camera/depth/image_rect/theora /camera/depth/image_rect/theora/parameter_descriptions /camera/depth/image_rect/theora/parameter_updates /camera/depth/image_rect_raw /camera/depth/image_rect_raw/compressed /camera/depth/image_rect_raw/compressed/parameter_descriptions /camera/depth/image_rect_raw/compressed/parameter_updates /camera/depth/image_rect_raw/compressedDepth /camera/depth/image_rect_raw/compressedDepth/parameter_descriptions /camera/depth/image_rect_raw/compressedDepth/parameter_updates /camera/depth/image_rect_raw/theora /camera/depth/image_rect_raw/theora/parameter_descriptions /camera/depth/image_rect_raw/theora/parameter_updates /camera/depth/points /camera/depth_rectify_depth/parameter_descriptions /camera/depth_rectify_depth/parameter_updates /camera/depth_registered/camera_info /camera/depth_registered/hw_registered/image_rect /camera/depth_registered/hw_registered/image_rect/compressed /camera/depth_registered/hw_registered/image_rect/compressed/parameter_descriptions /camera/depth_registered/hw_registered/image_rect/compressed/parameter_updates /camera/depth_registered/hw_registered/image_rect/compressedDepth /camera/depth_registered/hw_registered/image_rect/compressedDepth/parameter_descriptions /camera/depth_registered/hw_registered/image_rect/compressedDepth/parameter_updates /camera/depth_registered/hw_registered/image_rect/theora /camera/depth_registered/hw_registered/image_rect/theora/parameter_descriptions /camera/depth_registered/hw_registered/image_rect/theora/parameter_updates /camera/depth_registered/hw_registered/image_rect_raw /camera/depth_registered/hw_registered/image_rect_raw/compressed /camera/depth_registered/hw_registered/image_rect_raw/compressed/parameter_descriptions /camera/depth_registered/hw_registered/image_rect_raw/compressed/parameter_updates /camera/depth_registered/hw_registered/image_rect_raw/compressedDepth /camera/depth_registered/hw_registered/image_rect_raw/compressedDepth/parameter_descriptions /camera/depth_registered/hw_registered/image_rect_raw/compressedDepth/parameter_updates /camera/depth_registered/hw_registered/image_rect_raw/theora /camera/depth_registered/hw_registered/image_rect_raw/theora/parameter_descriptions /camera/depth_registered/hw_registered/image_rect_raw/theora/parameter_updates /camera/depth_registered/image /camera/depth_registered/image/compressed /camera/depth_registered/image/compressed/parameter_descriptions /camera/depth_registered/image/compressed/parameter_updates /camera/depth_registered/image/compressedDepth /camera/depth_registered/image/compressedDepth/parameter_descriptions /camera/depth_registered/image/compressedDepth/parameter_updates /camera/depth_registered/image/theora /camera/depth_registered/image/theora/parameter_descriptions /camera/depth_registered/image/theora/parameter_updates /camera/depth_registered/image_raw /camera/depth_registered/image_raw/compressed /camera/depth_registered/image_raw/compressed/parameter_descriptions /camera/depth_registered/image_raw/compressed/parameter_updates /camera/depth_registered/image_raw/compressedDepth /camera/depth_registered/image_raw/compressedDepth/parameter_descriptions /camera/depth_registered/image_raw/compressedDepth/parameter_updates /camera/depth_registered/image_raw/theora /camera/depth_registered/image_raw/theora/parameter_descriptions /camera/depth_registered/image_raw/theora/parameter_updates /camera/depth_registered/points /camera/depth_registered_rectify_depth/parameter_descriptions /camera/depth_registered_rectify_depth/parameter_updates /camera/driver/parameter_descriptions /camera/driver/parameter_updates /camera/ir/camera_info /camera/ir/image /camera/ir/image/compressed /camera/ir/image/compressed/parameter_descriptions /camera/ir/image/compressed/parameter_updates /camera/ir/image/compressedDepth /camera/ir/image/compressedDepth/parameter_descriptions /camera/ir/image/compressedDepth/parameter_updates /camera/ir/image/theora /camera/ir/image/theora/parameter_descriptions /camera/ir/image/theora/parameter_updates /camera/projector/camera_info /camera/rgb/camera_info /camera/rgb/image_raw /camera/rgb/image_raw/compressed /camera/rgb/image_raw/compressed/parameter_descriptions /camera/rgb/image_raw/compressed/parameter_updates /camera/rgb/image_raw/compressedDepth /camera/rgb/image_raw/compressedDepth/parameter_descriptions /camera/rgb/image_raw/compressedDepth/parameter_updates /camera/rgb/image_raw/theora /camera/rgb/image_raw/theora/parameter_descriptions /camera/rgb/image_raw/theora/parameter_updates /camera/rgb/image_rect_color /camera/rgb/image_rect_color/compressed /camera/rgb/image_rect_color/compressed/parameter_descriptions /camera/rgb/image_rect_color/compressed/parameter_updates /camera/rgb/image_rect_color/compressedDepth /camera/rgb/image_rect_color/compressedDepth/parameter_descriptions /camera/rgb/image_rect_color/compressedDepth/parameter_updates /camera/rgb/image_rect_color/theora /camera/rgb/image_rect_color/theora/parameter_descriptions /camera/rgb/image_rect_color/theora/parameter_updates /camera/rgb_rectify_color/parameter_descriptions /camera/rgb_rectify_color/parameter_updates /diagnostics /laser_status /odom /rosout /rosout_agg /rtabmap/cloud_ground /rtabmap/cloud_map /rtabmap/cloud_obstacles /rtabmap/global_path /rtabmap/global_path_nodes /rtabmap/global_pose /rtabmap/goal /rtabmap/goal_node /rtabmap/goal_out /rtabmap/goal_reached /rtabmap/gps/fix /rtabmap/grid_map /rtabmap/grid_prob_map /rtabmap/imu /rtabmap/info /rtabmap/initialpose /rtabmap/labels /rtabmap/landmarks /rtabmap/local_grid_empty /rtabmap/local_grid_ground /rtabmap/local_grid_obstacle /rtabmap/local_path /rtabmap/local_path_nodes /rtabmap/localization_pose /rtabmap/mapData /rtabmap/mapGraph /rtabmap/mapPath /rtabmap/octomap_binary /rtabmap/octomap_empty_space /rtabmap/octomap_full /rtabmap/octomap_grid /rtabmap/octomap_ground /rtabmap/octomap_obstacles /rtabmap/octomap_occupied_space /rtabmap/proj_map /rtabmap/rgbd_image /rtabmap/rgbd_image/compressed /rtabmap/scan_map /rtabmap/user_data_async /scan /tf /tf_static /urg_node/parameter_descriptions /urg_node/parameter_updates |
|
Administrator
|
Yeah, but in your rostopic list, there are /base_controller/odom and /base_scan, where do they come from unless you didn't change the remap? To be more explicit, you have to change
<remap from="odom" to="/base_controller/odom"/> <remap from="scan" to="/base_scan"/>to <remap from="odom" to="/odom"/> <remap from="scan" to="/scan"/> |
|
|
Hi after I correct what you said this error comes up :
[ WARN] [1566744598.148678736]: Could not get transform from base_link to camera_rgb_optical_frame after 0.200000 seconds (for stamp=1566744597.870345)! Error="Could not find a connection between 'base_link' and 'camera_rgb_optical_frame' because they are not part of the same tree.Tf has two or more unconnected trees.. canTransform returned after 0.201108 timeout was 0.2.". [ERROR] [1566744598.148755707]: TF of received image 0 at time 1566744597.870345s is not set! [ERROR] [1566744598.148816505]: Could not convert rgb/depth msgs! Aborting rtabmap update... |
|
Administrator
|
Hi,
What is your tf tree? ($ rosrun tf view_frames) It seems your camera frames are not connected to your base frame (base_link) |
|
|
Hi again,
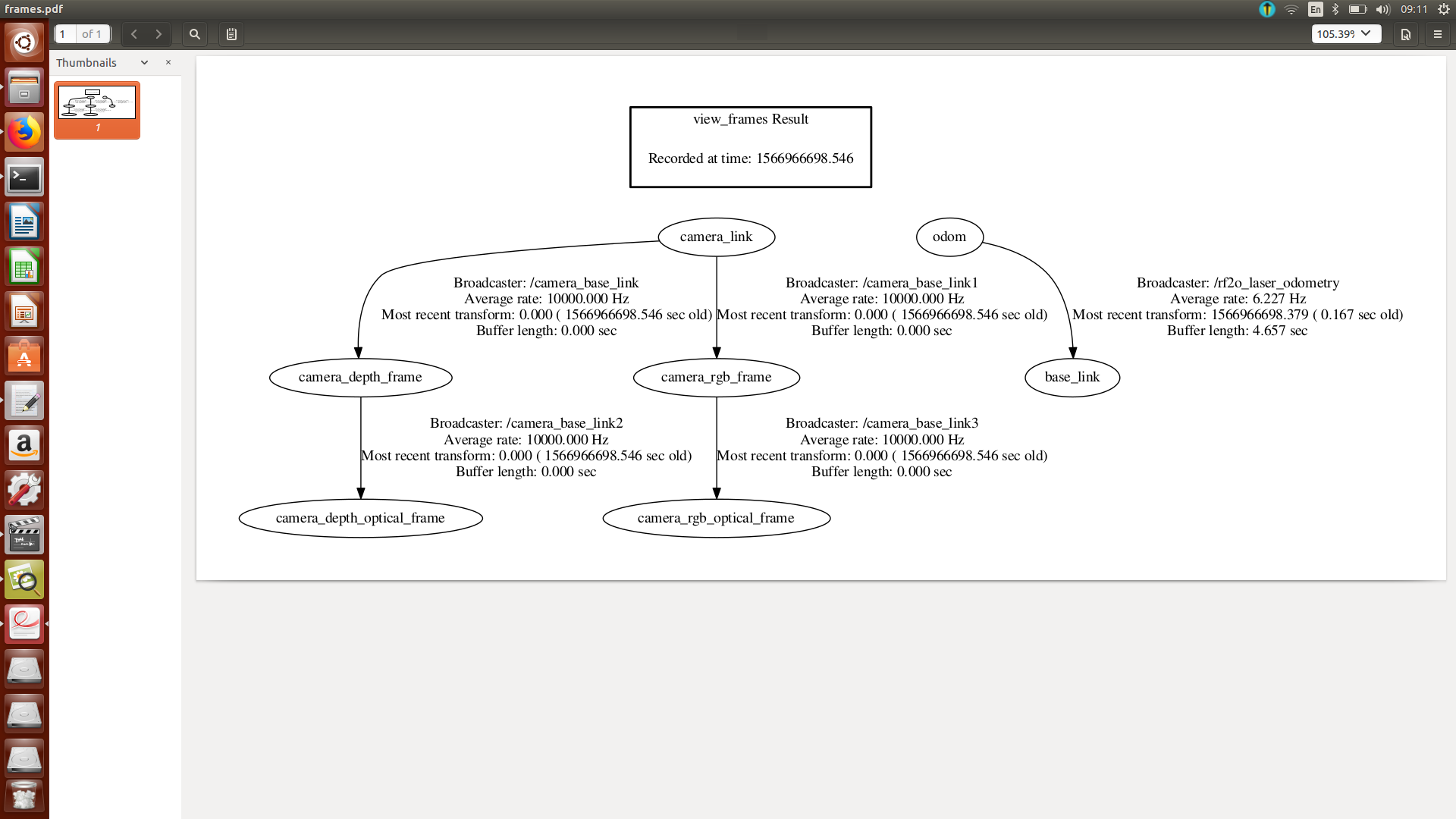 Here is my tf tree, how coulad I fix this distortion ?? |
|
Administrator
|
You can use a static_transform_publisher to add the link between base_link and camera_link
|
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |