https://drive.google.com/drive/folders/15fMnaFpHj2YdzMMj__Vn3BsuJa1bxfLN?usp=sharinghttp://https://drive.google.com/drive/folders/15fMnaFpHj2YdzMMj__Vn3BsuJa1bxfLN?usp=sharingHi,
I hope you are doing well.
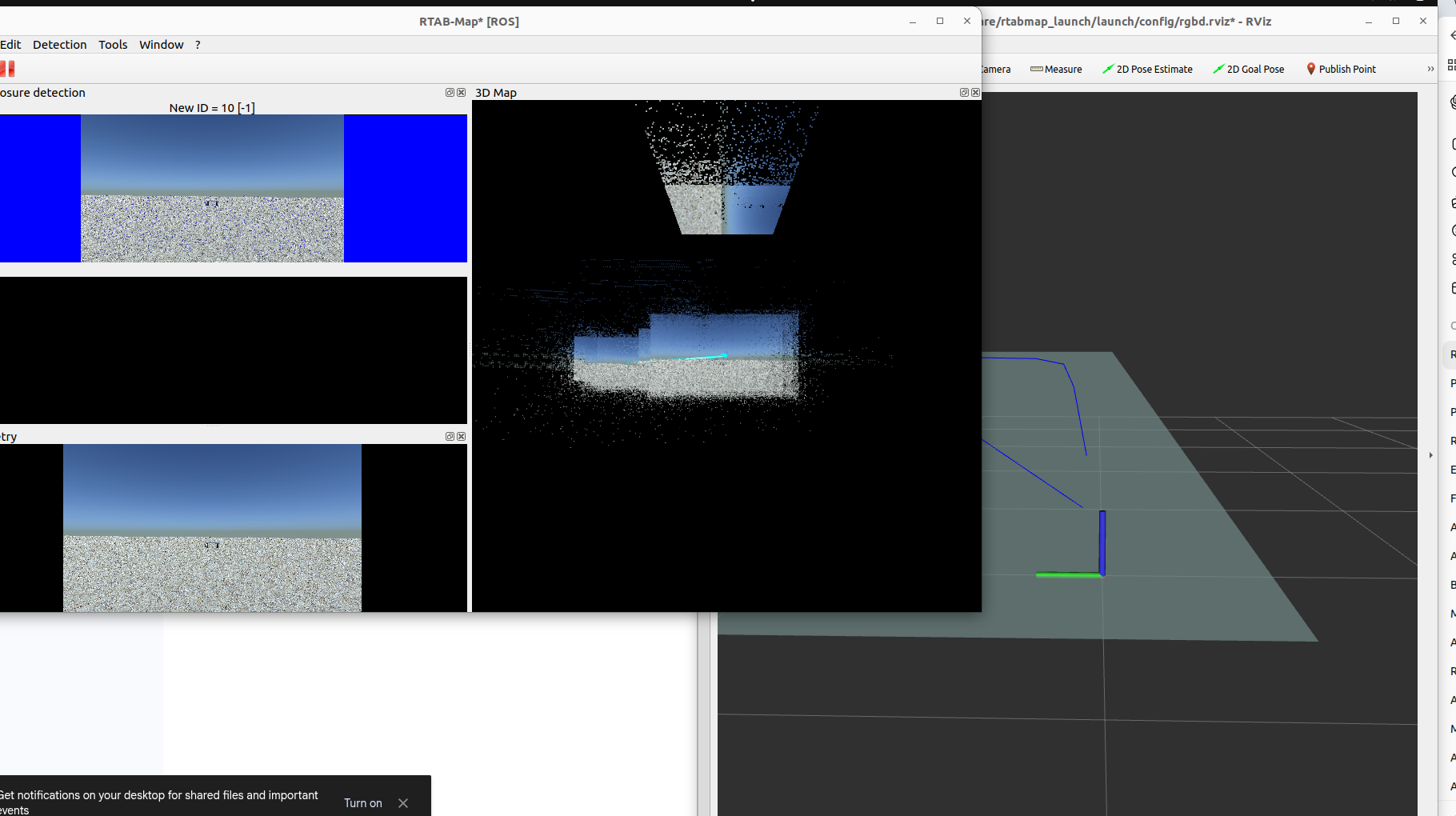
I’m running RTAB-Map (ROS 2 Humble) using simulated RGB-D topics from MAVS (Mississippi State University’s agricultural simulation).
RTAB-Map launches and subscribes successfully, but the map is not consistent and I receive repeated warnings about time-sync and invalid depth values.
in the attached link you can find the shared ros2bag file recorded from the running ros2 node in simulation.
this is the command I used:
ros2 launch rtabmap_launch rtabmap.launch.py args:="--delete_db_on_start" frame_id:=zed_left_camera_optical_frame odom_topic:=/mavs/odometry_true visual_odometry:=false rgb_topic:=/mavs/camera depth_topic:=/mavs/depth/depth_registered camera_info_topic:=/mavs/camera_info wait_imu_to_init:=true imu_topic:=/mavs/imu rviz:=true approx_sync:=true rgbd_sync:=true approx_rgbd_sync:=true topic_queue_size:=10 use_sim_time:=true
(Note: without launching my urdf)
the warnings are:
[rgbd_sync] The time difference between rgb and depth frames is high (diff≈0.43s)
[rtabmap] Cloud with only NaN values created!
[rtabmap_viz] Received odom topic with child_frame_id not set! Using "zed_left_camera_optical_frame" as base frame.
[rtabmap] (getting transform zed_left_camera_optical_frame -> imu_link) ... does not exist.
Would you please help me to solve the issue?