Hello all!
Please help me with my problems.
My camera is realsense D435. After download and install rtabmap_ros, I run
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" depth_topic:=/camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info
in the terminal.
There is warning in the terminal:
[ WARN] [1541916269.544172735]: /rtabmap/rgbd_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set.
/rtabmap/rgbd_odometry subscribed to (approx sync):
/camera/color/image_raw,
/camera/aligned_depth_to_color/image_raw,
/camera/color/camera_info
[ WARN] [1541916270.303259059]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10).
/rtabmap/rtabmap subscribed to (approx sync):
/rtabmap/odom,
/camera/color/image_raw,
/camera/aligned_depth_to_color/image_raw,
/camera/color/camera_info,
/rtabmap/odom_info
[ WARN] [1541916270.530203041]: /rtabmap/rtabmapviz: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10).
/rtabmap/rtabmapviz subscribed to (approx sync):
/rtabmap/odom,
/camera/color/image_raw,
/camera/aligned_depth_to_color/image_raw,
/camera/color/camera_info,
/rtabmap/odom_info
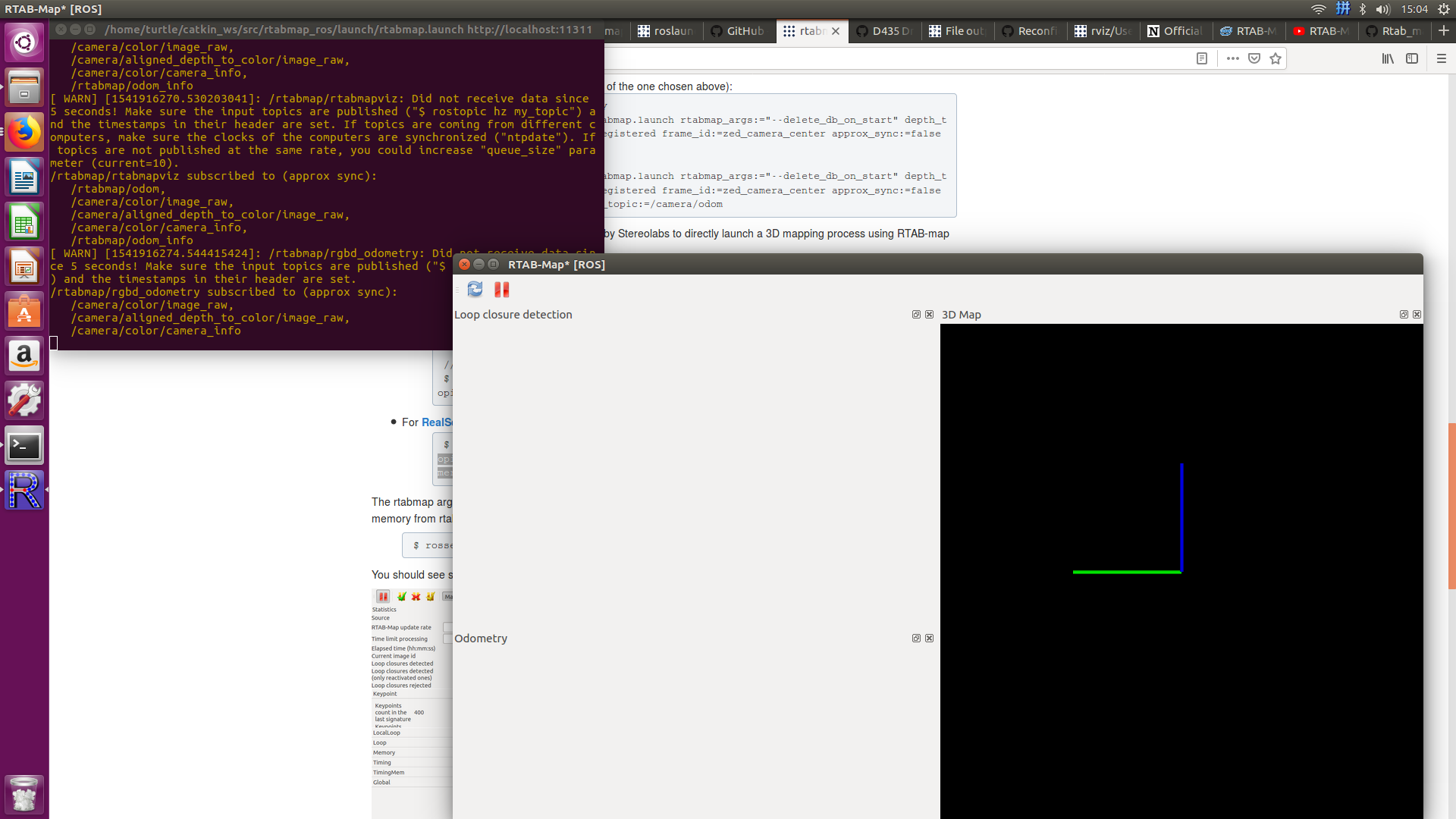
And the RTAB-MAP run, but no image output, like this picture: