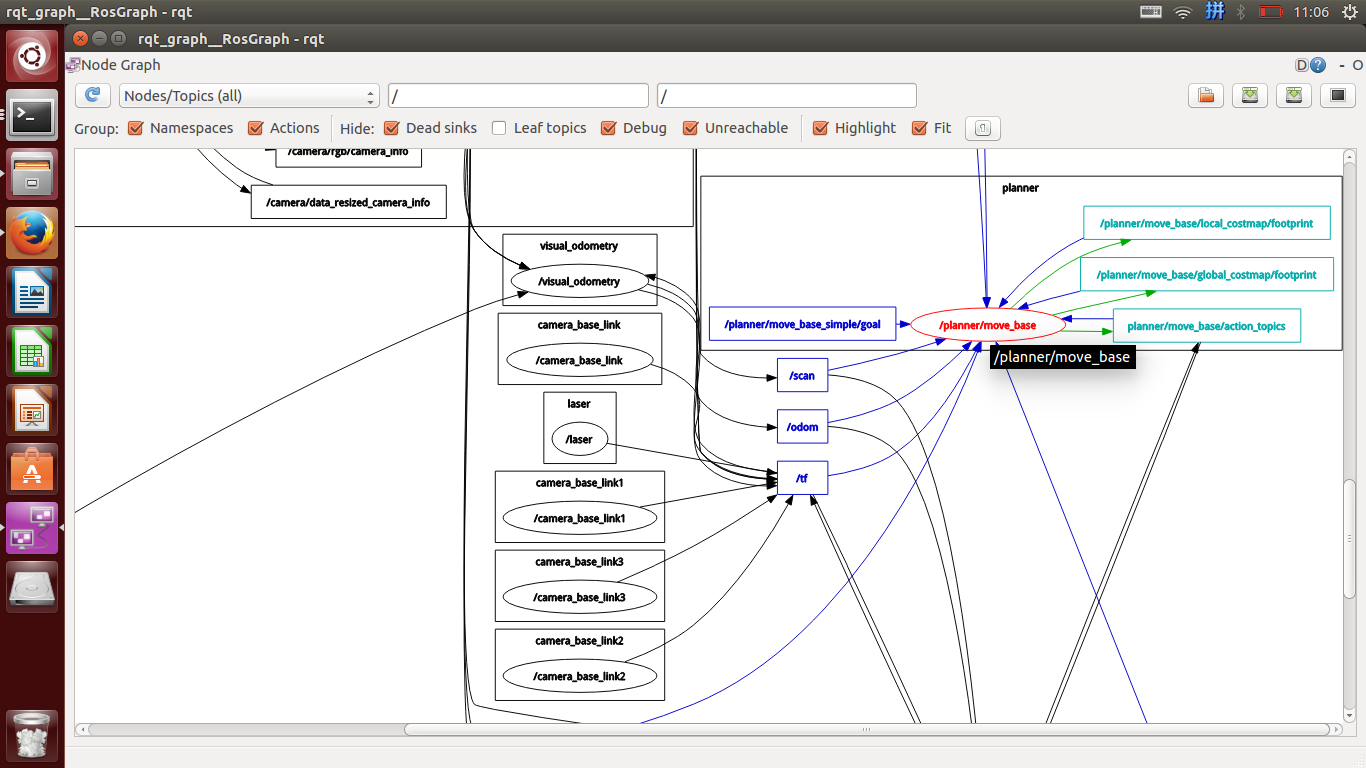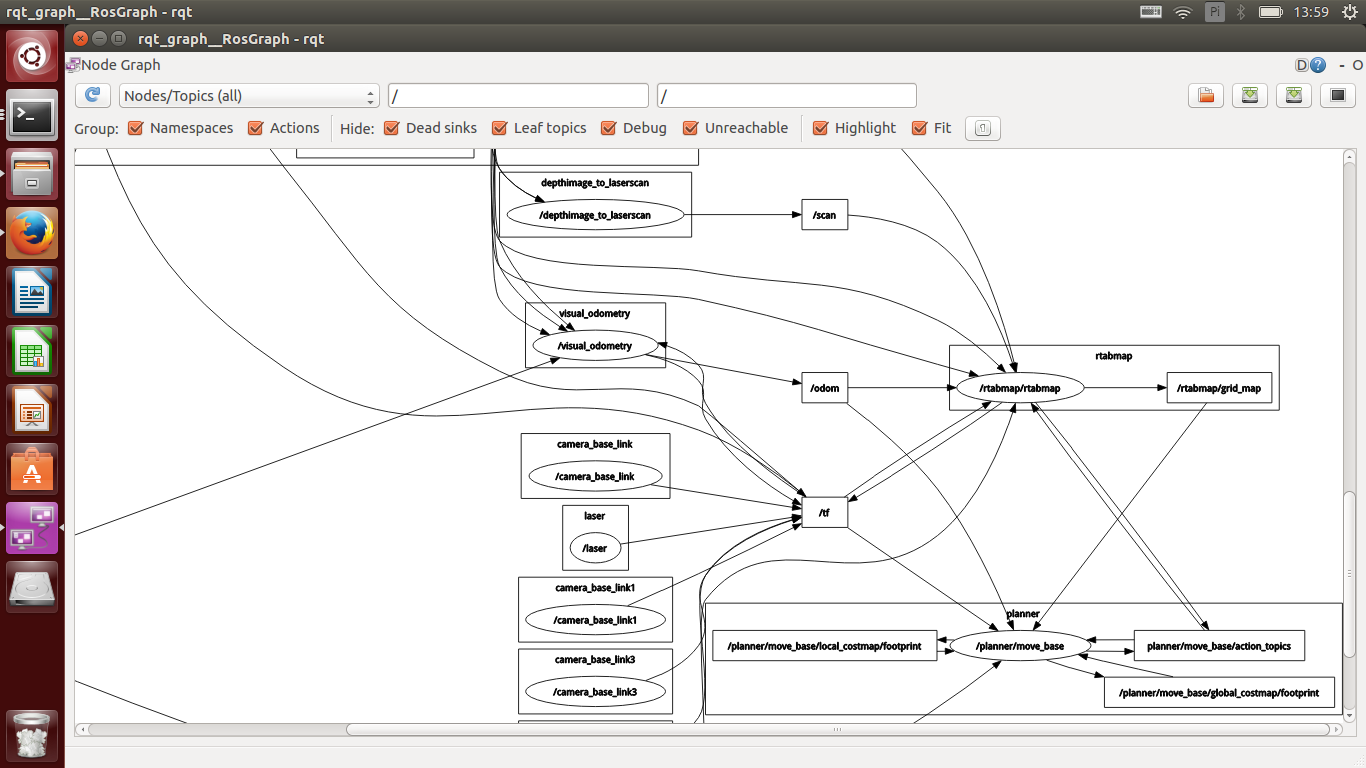
why /scan can't connect to move_base ?
my launch file:
<?xml version="1.0"?>
<launch>
<arg name="localization" default="false"/>
<arg if="$(arg localization)" name="rtabmap_args" default=""/>
<arg unless="$(arg localization)" name="rtabmap_args" default="--delete_db_on_start"/>
<include file="$(find freenect_launch)/launch/freenect.launch">
<arg name="depth_registration" value="true"/>
</include>
<node pkg="tf" type="static_transform_publisher" name="camera" args="0.25 0 0.12 0 0 0 base_link camera_link 100"/>
<node pkg="tf" type="static_transform_publisher" name="laser" args="0.25 0 0.12 0 0 0 base_link laser 100"/>
<node pkg="depthimage_to_laserscan" type="depthimage_to_laserscan" name="depthimage_to_laserscan">
<remap from="image" to="/camera/depth_registered/image_raw"/>
<remap from="camera_info" to="/camera/depth_registered/camera_info"/>
</node>
<node pkg="rtabmap_ros" type="rgbd_odometry" name="visual_odometry" output="screen">
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/depth_registered/camera_info"/>
<remap from="odom" to="/odom"/>
</node>
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="$(arg rtabmap_args)">
<remap from="odom" to="/odom"/>
<remap from="scan" to="/scan"/>
<remap from="mapData" to="mapData"/>
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/depth_registered/camera_info"/>
<remap from="goal_out" to="current_goal"/>
<remap from="move_base" to="/planner/move_base"/>
<remap from="grid_map" to="/rtabmap/grid_map"/>
</node>
</group>
<group ns="planner">
<remap from="map" to="/rtabmap/grid_map"/>
<remap from="odom" to="/odom"/>
<remap from="scan" to="/scan"/>
<node pkg="move_base" type="move_base" respawn="true" name="move_base" output="screen">
<rosparam file="$(find rtabmap_nav)/config/costmap_common_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find rtabmap_nav)/config/costmap_common_params.yaml" command="load" ns="local_costmap"/>
<rosparam file="$(find rtabmap_nav)/config/local_costmap_params.yaml" command="load" ns="local_costmap"/>
<rosparam file="$(find rtabmap_nav)/config/global_costmap_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find rtabmap_nav)/config/base_local_planner_params.yaml" command="load"/>
</node>
</group>
<include file="$(find rtabmap_nav)/launch/smooth_speed.launch"/>
</launch>