Hi,
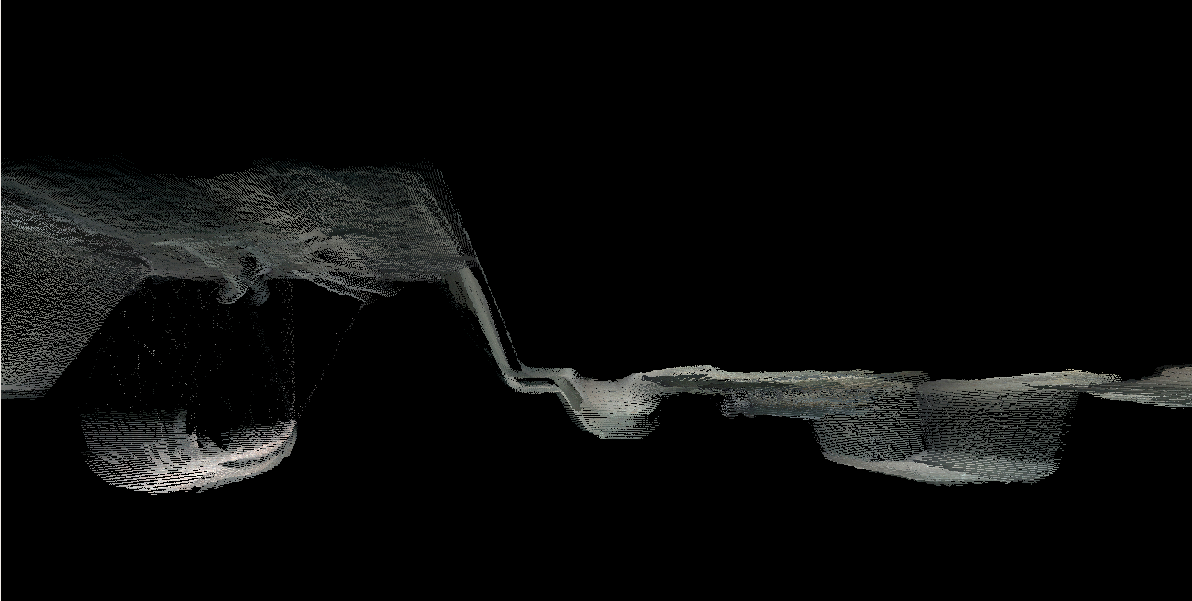
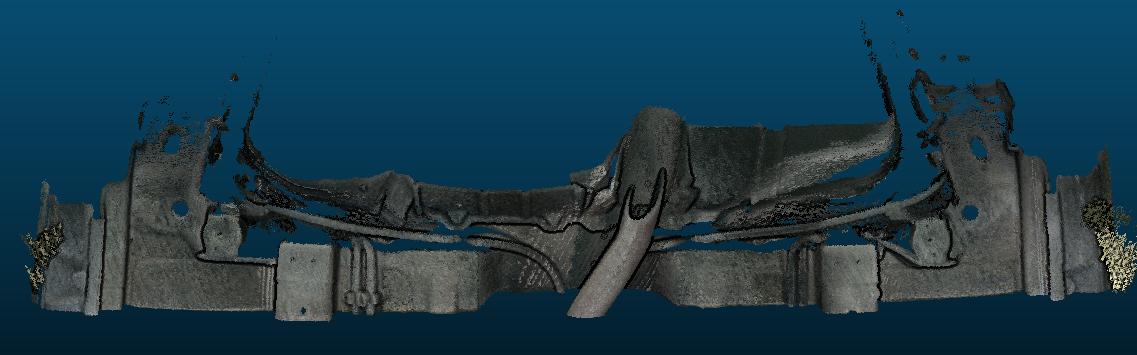
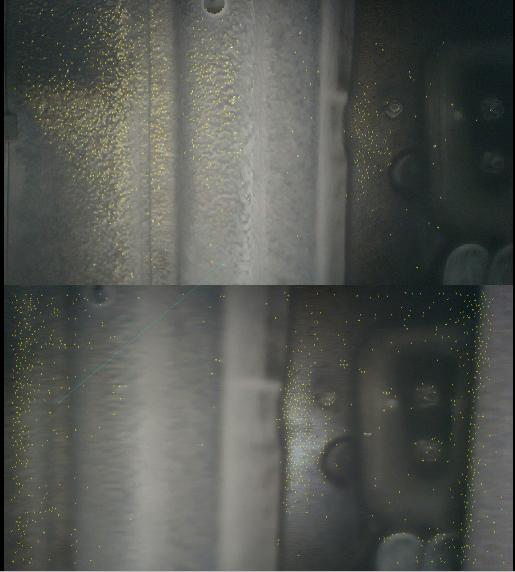
The geometry-only approach cannot work because the geometry is not enough complex (in all 3 axes) to work robustly. At least there are quite a lot of visual features to match between frames, however depending if visual features are located all at the same small spot of the image, rotation estimation can be not that accurate. Using vision seem to work relatively well, until there is motion blur in the camera:
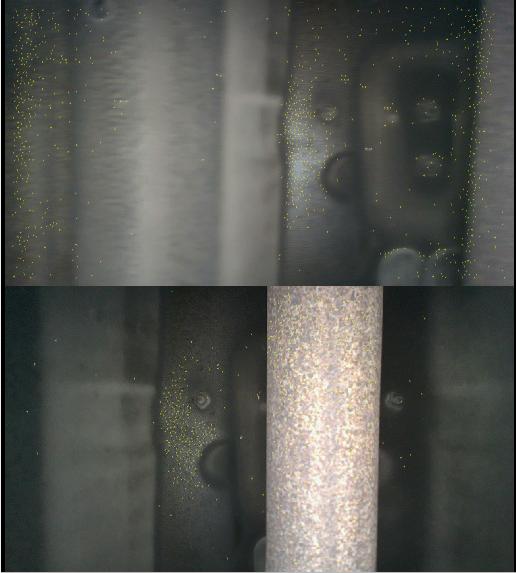
or camera focus is changing:
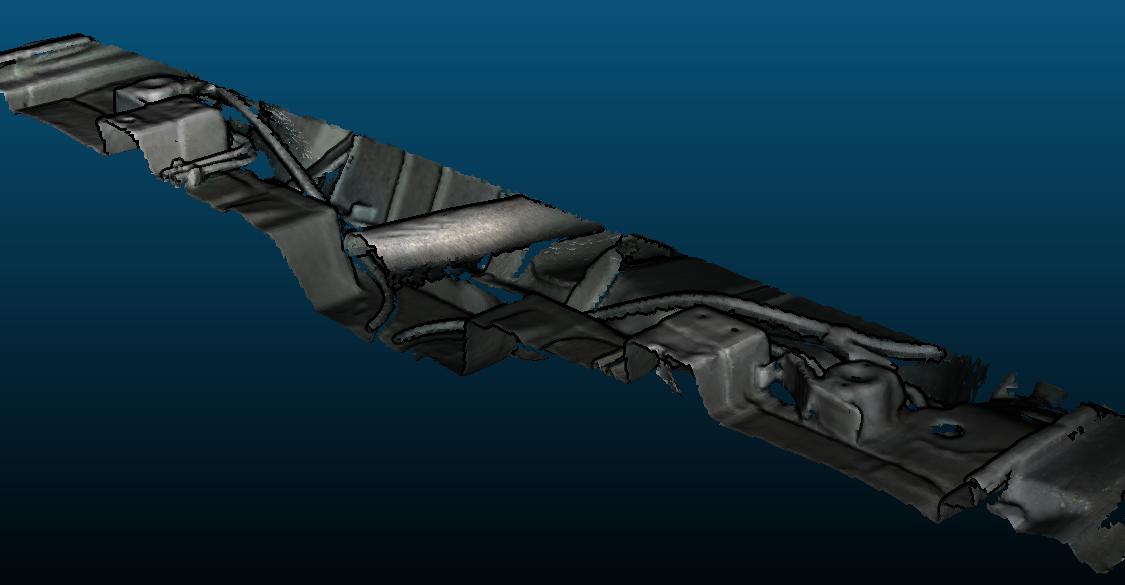
Mixing vision and ICP with the test_icp.db, this is the best I could do:
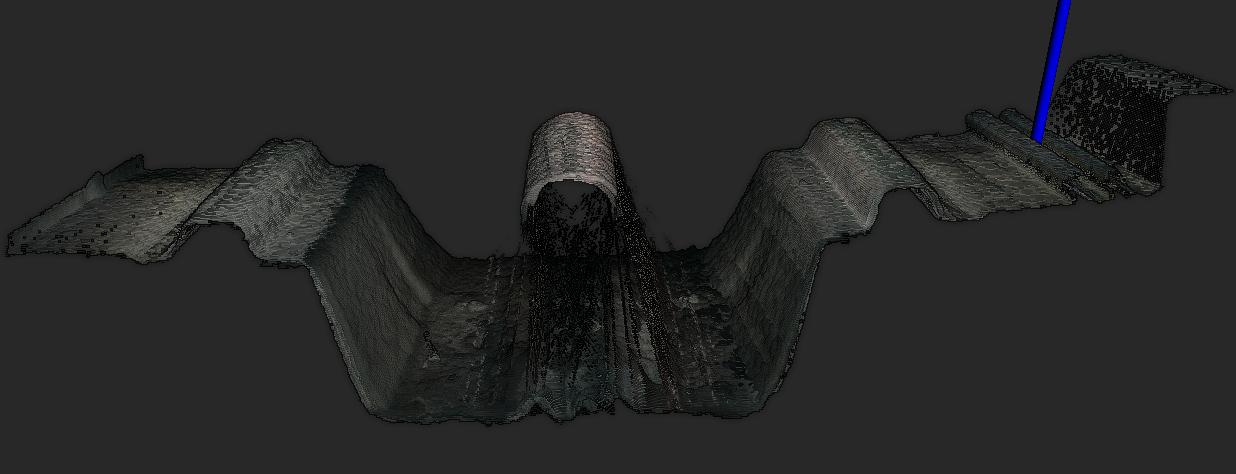
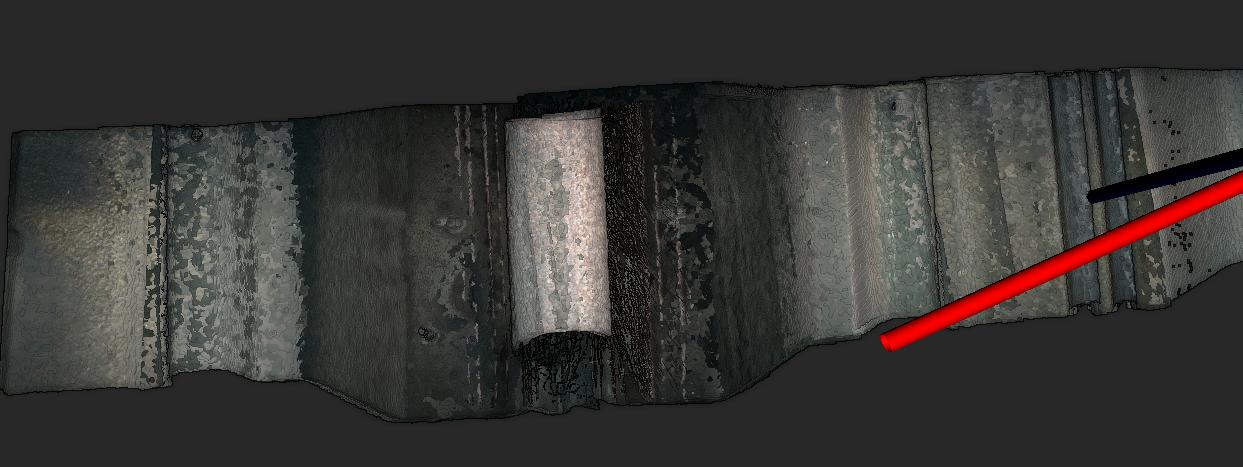
To help more, I would need a rosbag of the L515 data. The point cloud has to be filtered for the noisy points on the edge, which make ICP more difficult to do. I think the best approach would be a hybrid approach between vision and ICP (Reg/Strategy=2, or rgbdicp_odometry), but I would need that rosbag to make an example (I don't have one mixing both).
roslaunch realsense2_camera rs_camera.launch\
align_depth:=true \
unite_imu_method:="linear_interpolation" \
enable_gyro:=true \
enable_accel:=true
$ rosbag record /tf_static /tf /camera/imu /camera/depth/image_rect_raw /camera/depth/camera_info /camera/aligned_depth_to_color/image_raw /camera/color/image_raw /camera/color/camera_info
Make sure to move smoothly to avoid motion blur.
cheers,
Mathieu