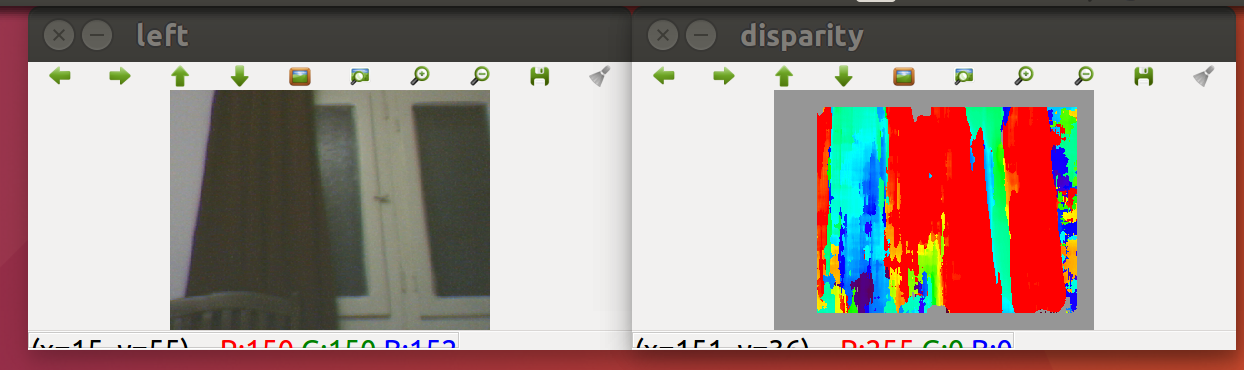
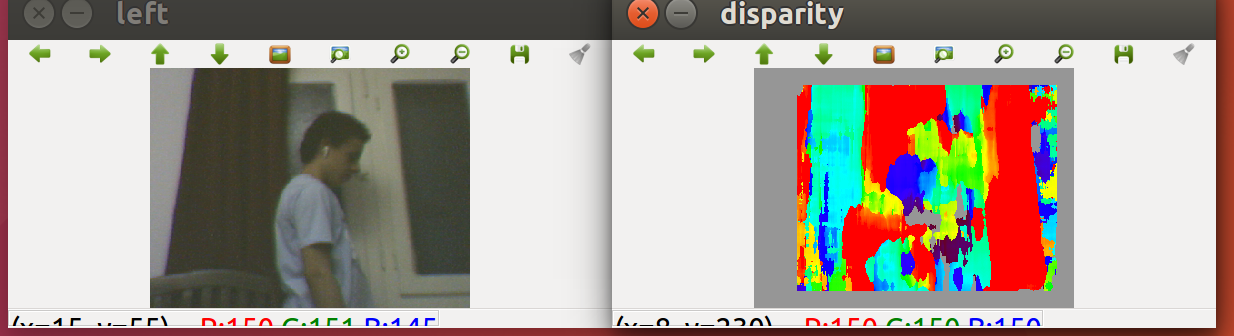
I tried to change the stereo parameters but I couldn't get a better disparity, the values of the parameters are
prefilter_size" value="9"
"prefilter_cap" value="31"
"correlation_window_size" value="35"
"min_disparity" value="-5"
"disparity_range" value="32"
"uniqueness_ratio" value="0.0"
"texture_threshold" value="0"
"speckle_size" value="0"
"speckle_range" value="0"
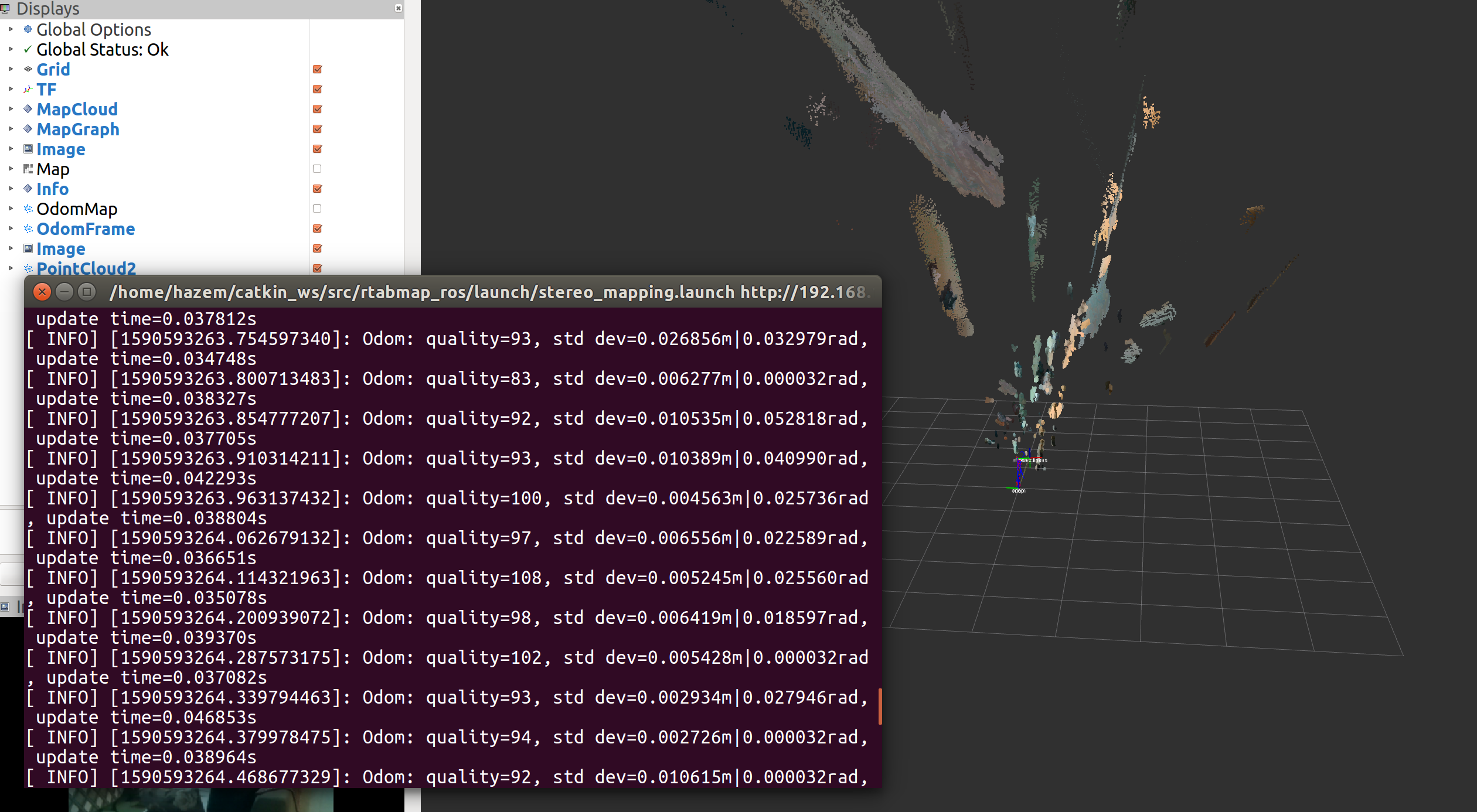
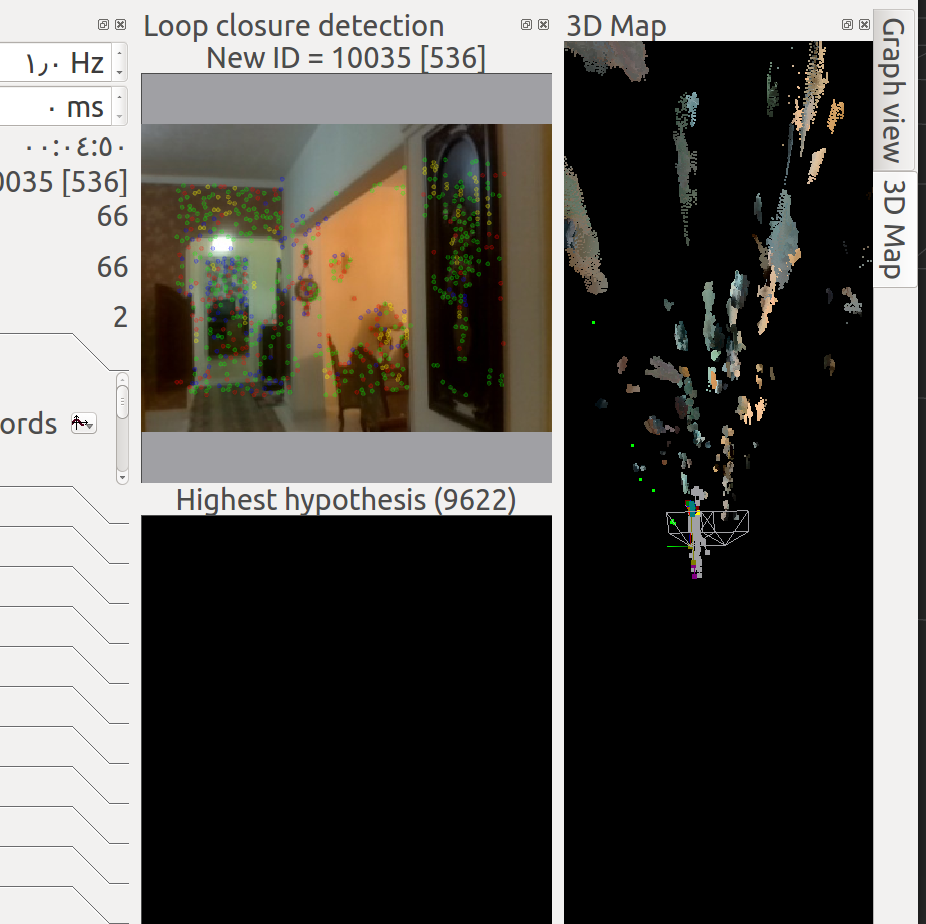
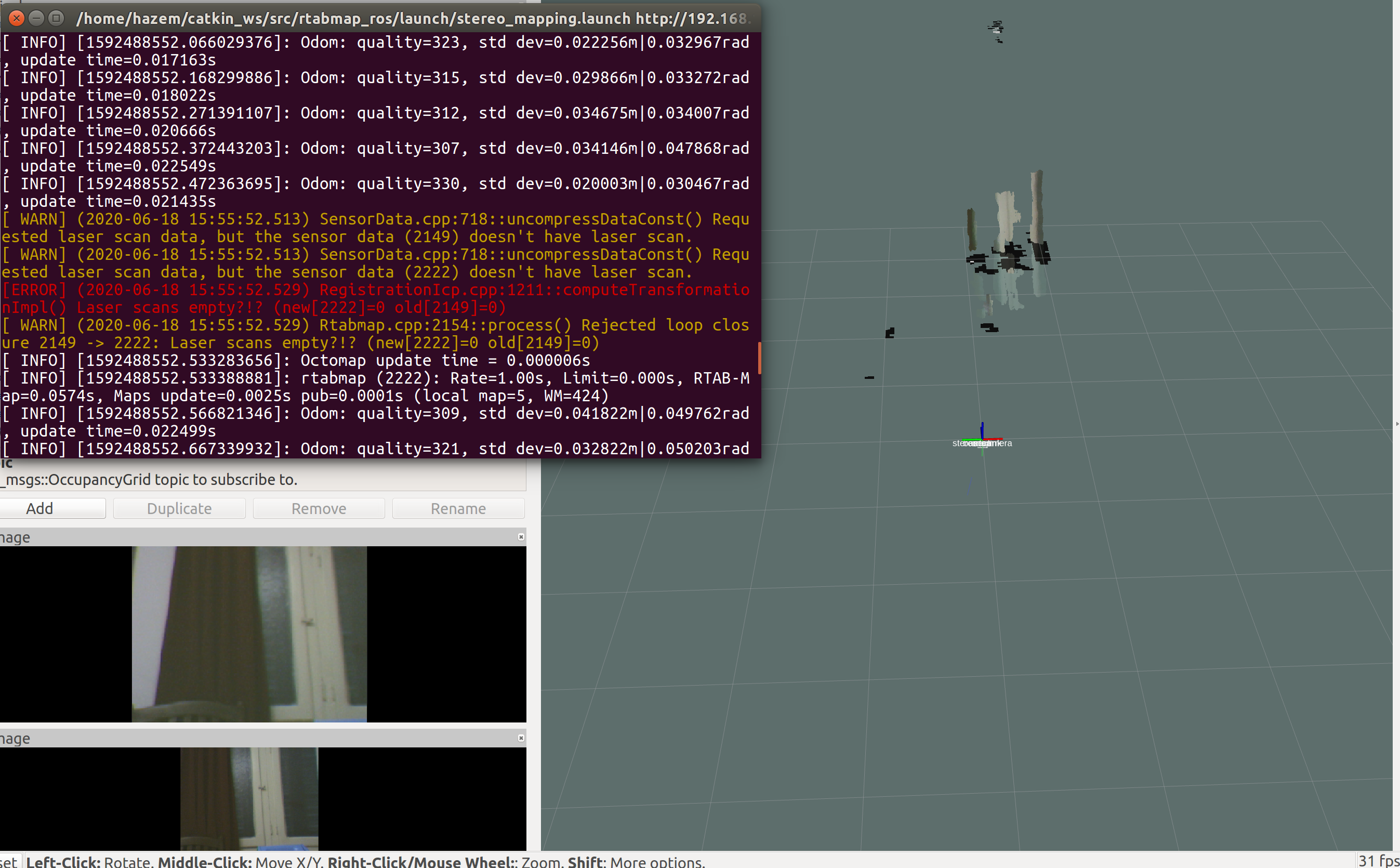
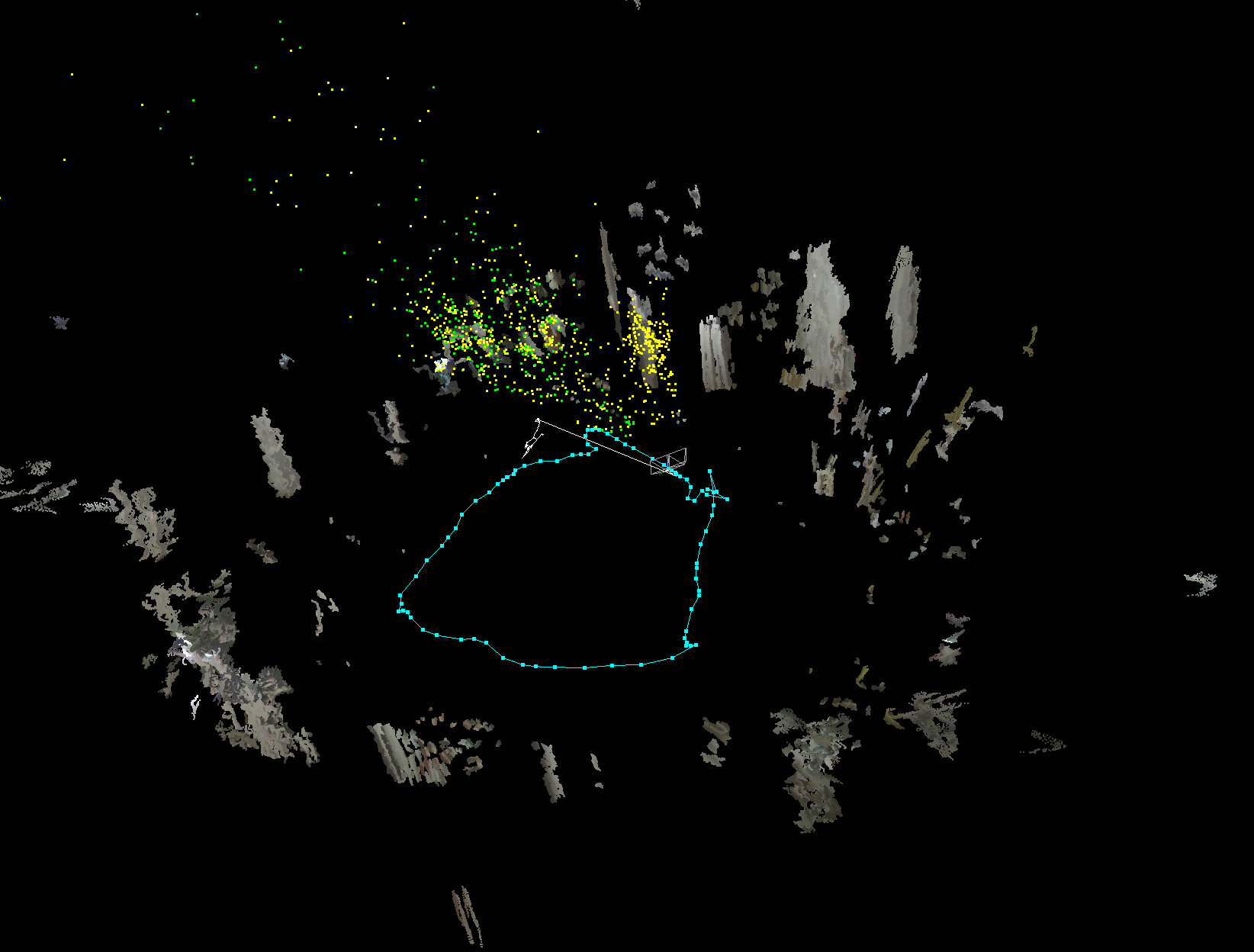
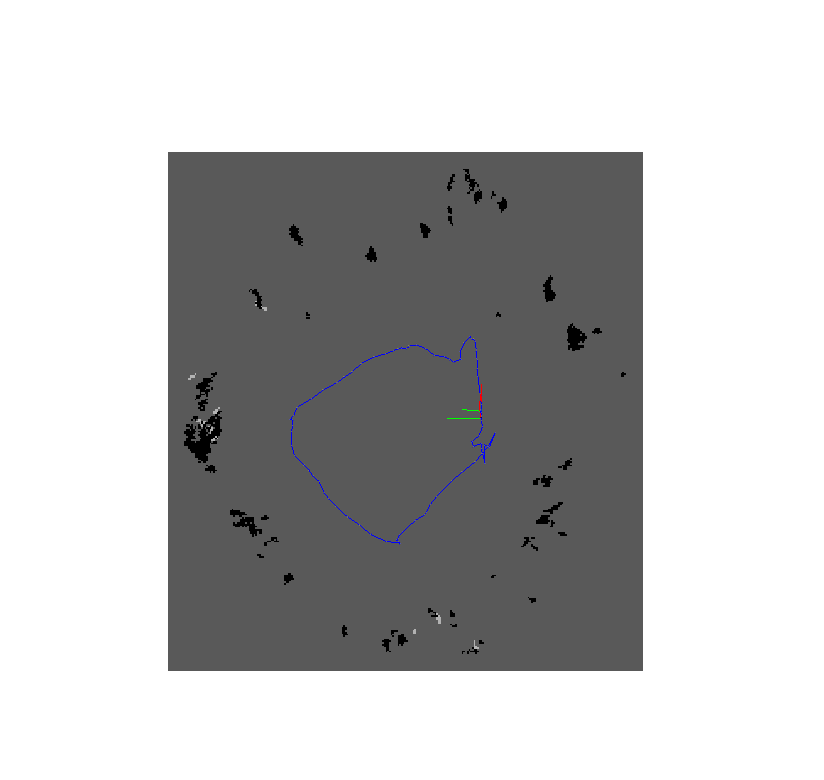
I also tried to change the parameters of the RTAB and re-calibrate the cameras and I ended up that the RTAB was able to follow up with the cameras meaning that the visual odometry worked perfectly as well as the loop closure detection but still there were no point cloud as seen in the photo
the parameters of the stereo odometry are
"Stereo/MaxDisparity" type="double" value="128"
"Stereo/OpticalFlow" type="string" value="true"
"Vis/MinInliers" type="string" value="10"/>
"OdomF2M/MaxSize" type="string" value="1000"/>
"Vis/RoiRatios" type="string" value="0.0 0.0 0.0 0.0"/>
"Odom/Strategy" value="0"/>
"Vis/CorType" value="0"/>
"Vis/MaxFeatures" type="string" value="1000"/>
"Vis/EstimationType" type="string" value="1"/>
"Vis/MaxDepth" type="string" value="0"/>
"Odom/GuessMotion" type="string" value="true"/>
unless="$(arg local_bundle)" name="OdomF2M/BundleAdjustment" type="string" value="1"/>
"GFTT/MinDistance" type="string" value="3"/>
"GFTT/QualityLevel" type="string" value="0.001"/>
"Vis/BundleAdjustment" type="string" value="1"/>
Vis/FeatureType" type="string" value="6"/>
The parameters of the RTAB are
"Grid/FromDepth" type="string" value="true"/>
"Grid/3D" type="string" value="true"/>
"Stereo/MaxDisparity" type="double" value="128"/>
"Stereo/OpticalFlow" type="string" value="true"/>
"Rtabmap/TimeThr" type="string" value="0"/>
"RGBD/ProximityBySpace" type="string" value="true"/>
RGBD/ProximityByTime" type="string" value="false"/>
"Reg/Strategy" type="string" value="0"/>
"RGBD/OptimizeFromGraphEnd" type="string" value="false"/>
RGBD/OptimizeMaxError" type="string" value="3"/>
"Mem/STMSize" type="string" value="10"/>
"RGBD/LocalRadius" type="string" value="10"/>
"Icp/CorrespondenceRatio" type="string" value="0.1"/>
"Kp/MAxDepth" type="string" value="0"/>
"AngularUpdate" type="string" value="0.1"/>
"RGBD/LinearUpdate" type="string" value="0.1"/>
"Reg/Force3DoF" type="string" value="false"/>
Vis/MinInliers" type="string" value="10"/>
"GridGlobal/MinSize" type="double" value="0"/>
"Grid/NoiseFilteringRadius" value="0.0"/>
"Grid/NoiseFilteringMinNeighbors" value="5"/>
"Grid/DepthDecimation" type="string" value="4"/>
"Grid/FlatObstacleDetected" type="string" value="true"/>
"Kp/DetectorStrategy" type="string" value="6"/>
"RGBD/CreateOccupancyGrid" type="string" value="true"/>
"Rtabmap/DetectionRate" type="string" value="1"/>
"Grid/RangeMax" type="string" value="5"/>
"Kp/MaxFeatures" type="string" value="500"/>
"Kp/RoiRatios" type="string" value="0.0 0.0 0.0 0.0"/>
"Kp/NNStrategy" type="string" value="1"/>
"SURF/HessianThreshold" type="string" value="500"/>
"Vis/EstimationType" type="string" value="1"/>
"RGBD/LoopClosureReextractFeatures" type="string" value="false"/>
"Vis/MaxFeatures" type="string" value="1000"/>
"LccReextract/depth" type="string" value="0"/>
"Mem/UseOdomFeatures" type="string" value="true"/>