Re: Hesai QT128 with Zed2i and external fused Odometry
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Hesai-QT128-with-Zed2i-and-external-fused-Odometry-tp9512p10005.html
You may be able to set Icp/VoxelSize=0.2 to reduce ICP time when doing proximity detection.
I also see that you disabled rotation optimization on the tags:
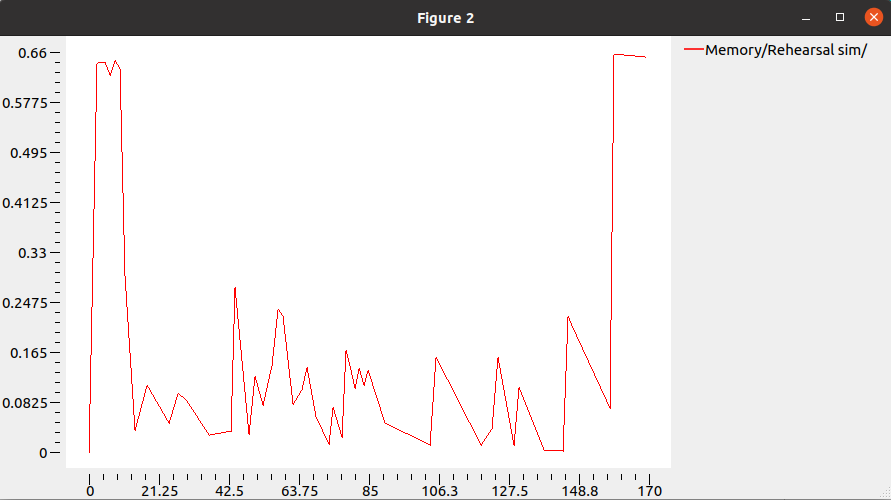
Setting 'Mem/RehearsalSimilarity','0.20' maybe better for that kind of environment to keep more uniformly distributed nodes in WM.
For integration with nav2, it seems that we would need to put more effort to add services to rtabmap to be compatible with nav2 state machine. Currently to know if rtabmap is localized, you would need to look at the /rtabmap/localization_pose covariance published, large covariance means lost. In ros diagnostic, we can also see the status of the node, localized or not.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Hesai-QT128-with-Zed2i-and-external-fused-Odometry-tp9512p10005.html
You may be able to set Icp/VoxelSize=0.2 to reduce ICP time when doing proximity detection.
I also see that you disabled rotation optimization on the tags:
[0.001, 0, 0, 0, 0, 0; 0, 0.001, 0, 0, 0, 0; 0, 0, 0.001, 0, 0, 0; 0, 0, 0, 9999, 0, 0; 0, 0, 0, 0, 9999, 0; 0, 0, 0, 0, 0, 9999]If rotation estimation of the tags is bad, that can help to get better optimization.
Setting 'Mem/RehearsalSimilarity','0.20' maybe better for that kind of environment to keep more uniformly distributed nodes in WM.
For integration with nav2, it seems that we would need to put more effort to add services to rtabmap to be compatible with nav2 state machine. Currently to know if rtabmap is localized, you would need to look at the /rtabmap/localization_pose covariance published, large covariance means lost. In ros diagnostic, we can also see the status of the node, localized or not.
| Free forum by Nabble | Edit this page |