Re: Navigation with stereo camera only
Posted by minato_99 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Navigation-with-stereo-camera-only-tp9991p10041.html
Hello matlabbe,
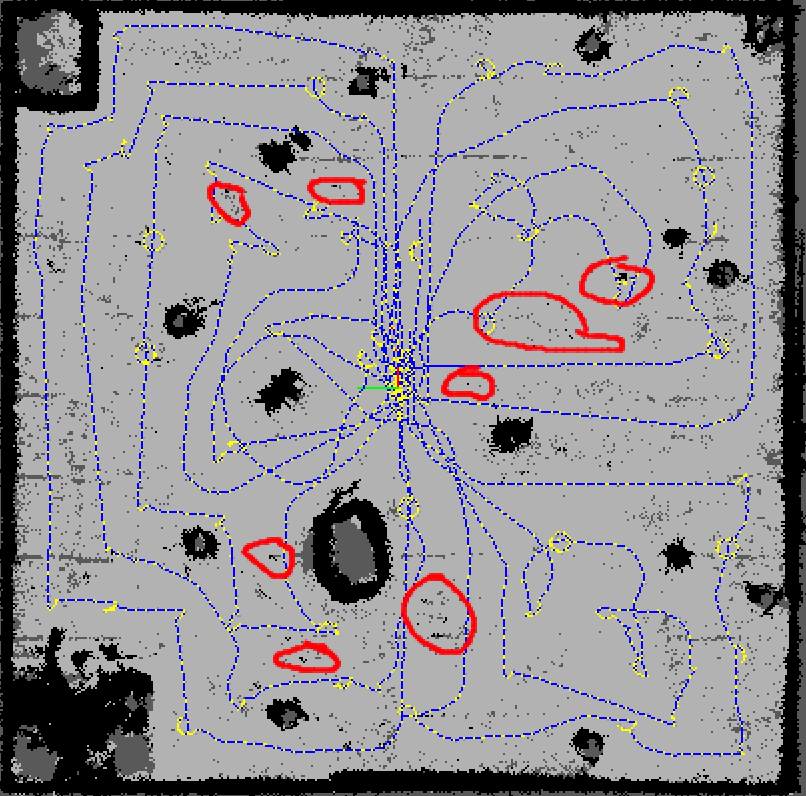
The global trajectory is being created avoiding the obstacles. However, the map being created has noise representing obstacles and some empty space. I have attached the stereo camera used for gazebo simulation and the map with noise.
Can you tell me which parameters should I choose to get a better point clouds with less noise?
Stereo Camera for gazebo simulations:
<gazebo reference="camera">
<sensor type="multicamera" name="left_stereo_camera">
<update_rate>10</update_rate>
<camera name="left">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>20</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<camera name="right">
<pose>0 -0.07 0 0 0 0</pose>
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>20</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="stereo_camera_controller" filename="libgazebo_ros_multicamera.so">
<alwaysOn>true</alwaysOn>
<updateRate>10.0</updateRate>
<cameraName>stereo</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
Map:
LAUNCH FILE:
rtab_stereo.launch
Thanks,
minato_99
URL: http://official-rtab-map-forum.206.s1.nabble.com/Navigation-with-stereo-camera-only-tp9991p10041.html
Hello matlabbe,
The global trajectory is being created avoiding the obstacles. However, the map being created has noise representing obstacles and some empty space. I have attached the stereo camera used for gazebo simulation and the map with noise.
Can you tell me which parameters should I choose to get a better point clouds with less noise?
Stereo Camera for gazebo simulations:
<gazebo reference="camera">
<sensor type="multicamera" name="left_stereo_camera">
<update_rate>10</update_rate>
<camera name="left">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>20</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<camera name="right">
<pose>0 -0.07 0 0 0 0</pose>
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>20</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="stereo_camera_controller" filename="libgazebo_ros_multicamera.so">
<alwaysOn>true</alwaysOn>
<updateRate>10.0</updateRate>
<cameraName>stereo</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
Map:
LAUNCH FILE:
rtab_stereo.launch
Thanks,
minato_99
| Free forum by Nabble | Edit this page |